- Sistemas TC y TD
- SeÃąales TC y TD
- SLIT TC
- SLIT TD
- Fourier TC
- Fourier TD
Selecciona un tema de arriba.
Primero selecciona un tema de arriba.
Señales en TC y en TD:
En los ejemplos con soluciÃģn de esta secciÃģn se abordan conceptos de seÃąales continuas y discretas. Se realizan operaciones y transformaciones de las seÃąales. Se presentan seÃąales fundamentales de tiempo continuo y discreto y su representaciÃģn en el dominio del tiempo. Se presenta el anÃĄlisis de seÃąales tanto teÃģrico como simulado.
Selecciona la dificultad en las caritas de la izquierda.
Señales en TC y en TD nivel principiante:
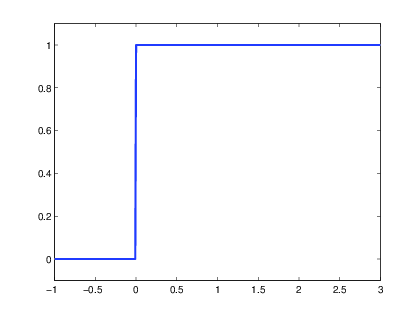
- Con base en la EcuaciÃģn 2.8, grafique la seÃąal escalÃģn unitario u(t).
- Con base en la EcuaciÃģn 2.9, grafique la seÃąal rampa r(t).
- Utilice la funciÃģn sinc(t) para obtener la grÃĄfica de la seÃąal Sinc EcuaciÃģn 2.13.
-
Utilice la funciÃģn diric(t,N) para obtener cuatro grÃĄficas de la seÃąal Dirichlet EcuaciÃģn 2.15. Considere los siguientes valores de N: 4, 5, 7 y 8. Utilice una funciÃģn subplot() para graficar las cuatro seÃąales.
(2.15) drcl(t,â N)â =â (sen(ÏNt))/(Nsen(Ït))
- Considere la seÃąal exponencial, EcuaciÃģn 2.16, con Câ =â 1 y râ =â â ââ 0.5, râ =â 0.5, râ =â 0. Utilice la funciÃģn subplot() para graficar las tres seÃąales exponenciales.
- Considere la seÃąal exponencial, EcuaciÃģn 2.16, con Câ =â 1 y râ =â j2Ï, râ =â â ââ 0.5â +â j2Ï, râ =â 0.5â +â j2Ï. Utilice la funciÃģn subplot() para graficar las tres seÃąales exponenciales complejas. Ya que las seÃąales son complejas, se tiene que graficar la parte real y la parte imaginaria, o bien la magnitud y la fase.
1)
>> t=-1:0.01:3;
>> u = 0.*(t<0)+ 1.*(t>=0);
>> plot(t,u, âLineWidthâ,2)
>> axis([-1 3 -.1 1.1]);
2)
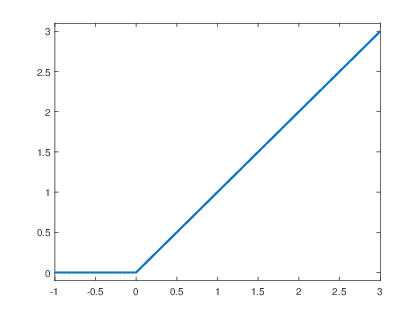
>> t=-1:0.001:3;
>> r = 0.*(t<0)+ t.*(t>=0);
>> plot(t,r, âLineWidthâ,2)
>> axis([-1 3 -.1 3.1]);
3)
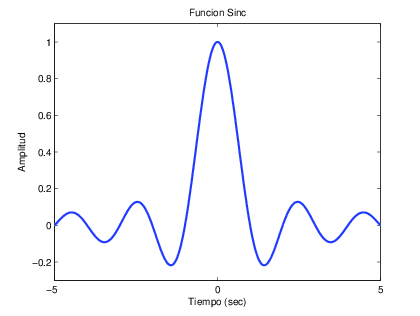
>> t = -5:.01:5;
>> y = sinc(t);
>> plot(t,y, âLinewidthâ,2);
>> xlabel(âTiempo (sec)â);ylabel(âAmplitudâ); title(âFuncion Sincâ)
>> axis([-5 5 -.3 1.1]);
La seÃąal cruza en cero en mÚltiplos de mÏ y el ÃĄrea bajo la curva estÃĄ dada por
4) La funciÃģn para generarla en Matlab es
de manera que para obtener la seÃąal EcuaciÃģn 2.27 cambia a:
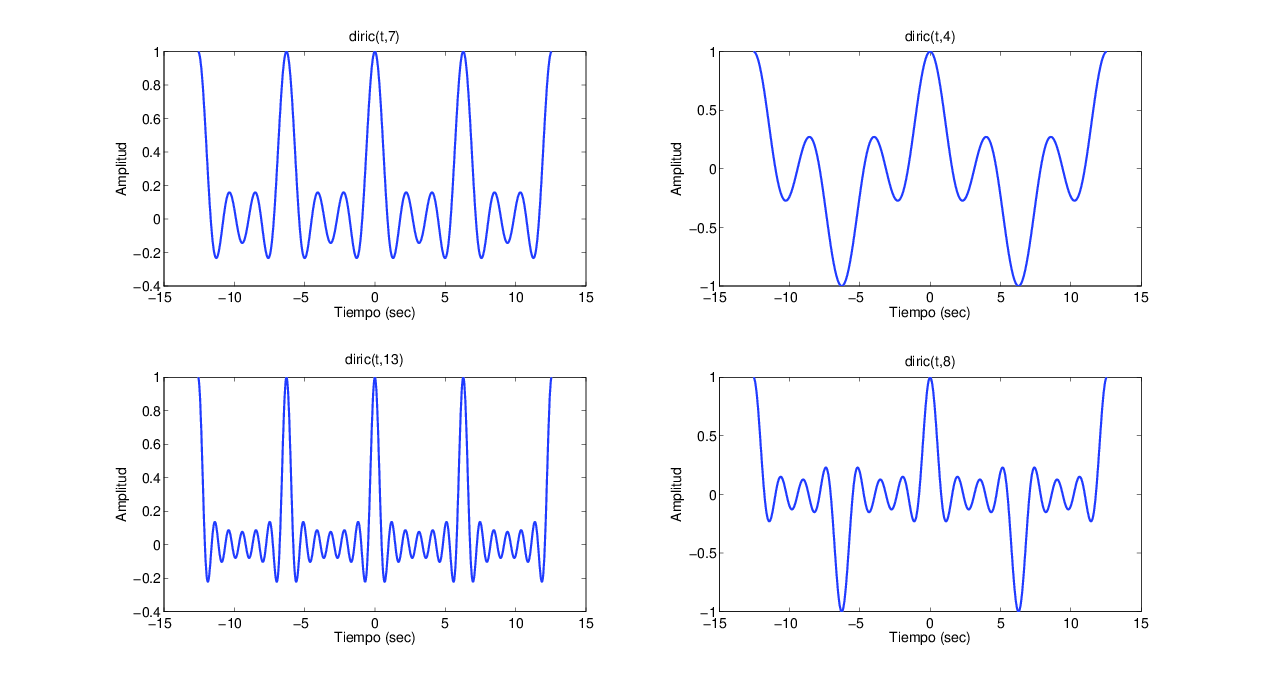
>> t = linspace(-4*pi,4*pi,1000);
>> subplot(221),plot(t,diric(t,7),âLinewidthâ,2);
>> xlabel(âTiempo (sec)â);ylabel(âAmplitudâ); title(âdiric(t,7)â)
>> subplot(222),plot(t,diric(t,4),âLinewidthâ,2);
>> xlabel(âTiempo (sec)â);ylabel(âAmplitudâ); title(âdiric(t,4)â)
>> subplot(223),plot(t,diric(t,13),âLinewidthâ,2);
>> xlabel(âTiempo (sec)â);ylabel(âAmplitudâ); title(âdiric(t,13)â)
>> subplot(224),plot(t,diric(t,8),âLinewidthâ,2);
>> xlabel(âTiempo (sec)â);ylabel(âAmplitudâ); title(âdiric(t,8)â)
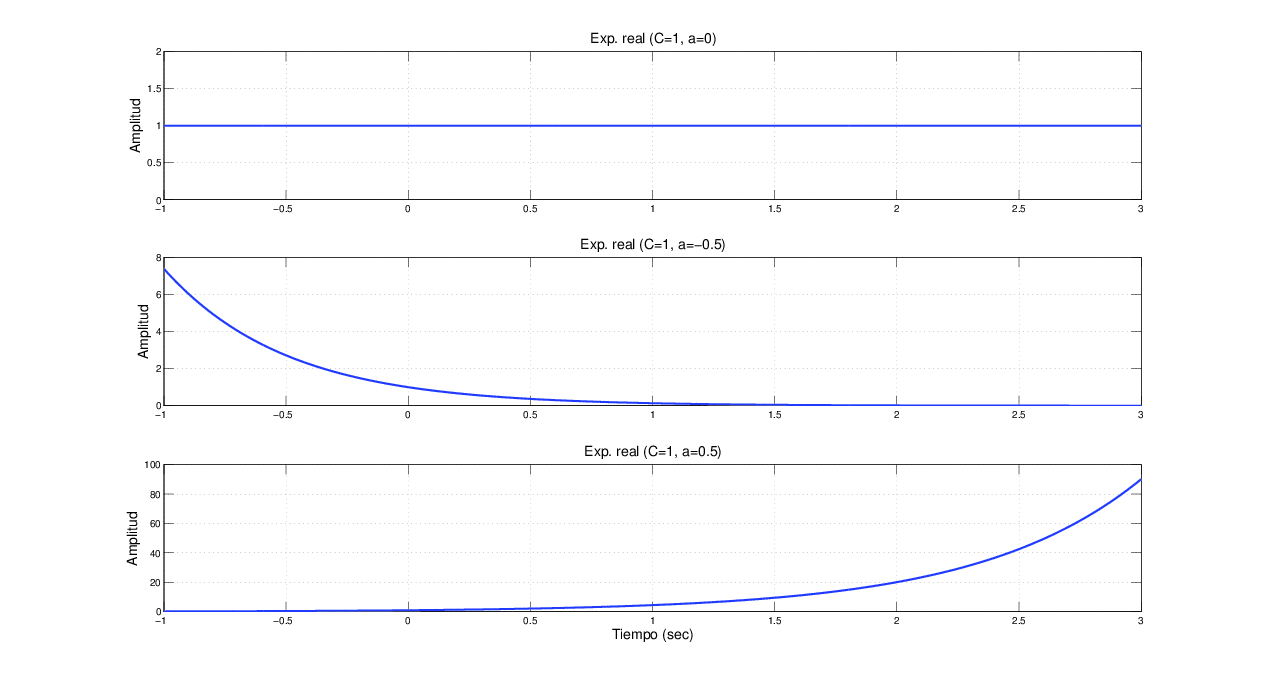
%exporeal1.m
t = linspace(-1,3,1000);
%Exponencial Real constante
c=1; r=0;
x=c*exp(r*t);
subplot(311),plot(t,abs(x),âLinewidthâ,2); grid
xlabel(âTiempo (sec)â);ylabel(âAmplitudâ);
title(âReal(Exp.real) (C=1, a=0)â)
%Exponencial Real decreciente
c=1; r=-2;
x=c*exp(r*t);
subplot(312),plot(t,abs(x),âLinewidthâ,2);grid
xlabel(âTiempo (sec)â);ylabel(âAmplitudâ);
title(âReal(Exp.real) (C=1, a=-0.5)â)
%Exponencial Real creciente
c=1; r=1.5;
x=c*exp(r*t);
subplot(313),plot(t,abs(x),âLinewidthâ,2);grid
xlabel(âTiempo (sec)â);ylabel(âAmplitudâ);
title(âReal(Exp.real) (C=1, a=0.5)â)
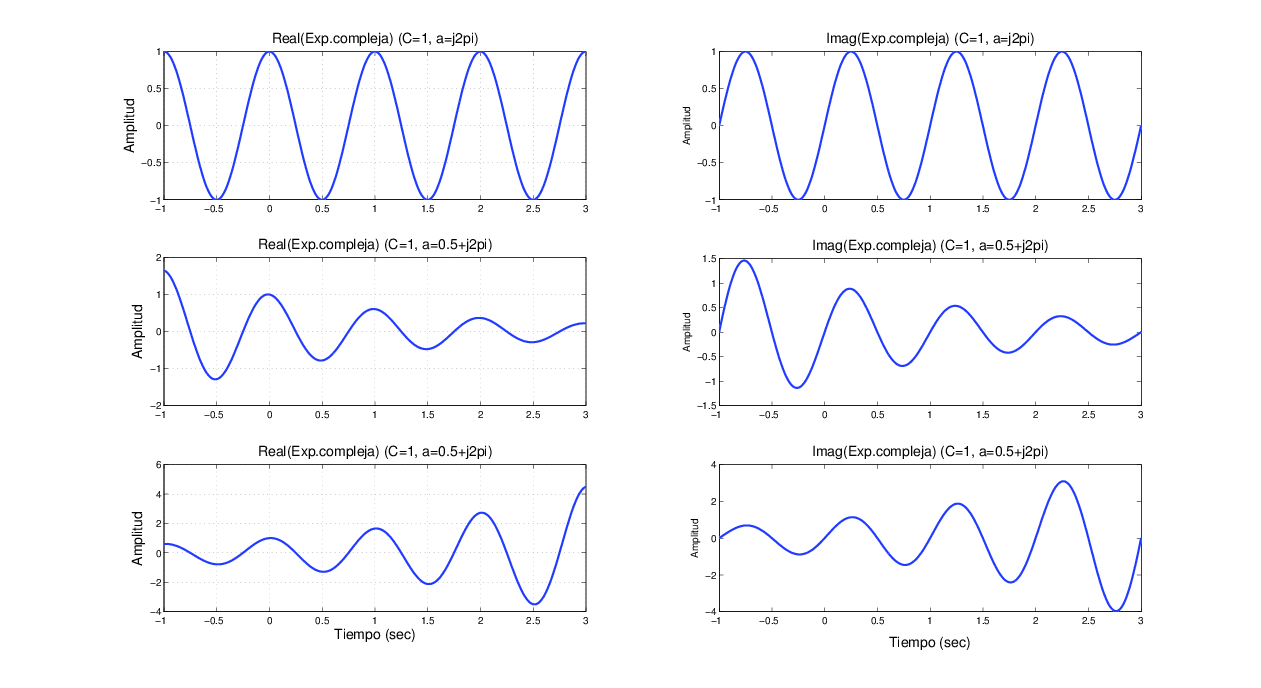
t = linspace(-1,3,1000);
%Exponencial Compleja constante
c=1; r=j*2*pi;
x=c*exp(r*t);
subplot(321),plot(t,real(x),âLinewidthâ,2); grid
xlabel(âTiempo (sec)â);ylabel(âAmplitudâ);
title(âReal(Exp.compleja) (C=1, a=j2pi)â)
subplot(322),plot(t,imag(x),âLinewidthâ,2);
xlabel(âTiempo (sec)â);ylabel(âAmplitudâ);
title(âImag(Exp.compleja) (C=1, a=j2pi)â)
%Exponencial Compleja decreciente
c=1; r=-0.5+j*2*pi;
x=c*exp(r*t);
subplot(323),plot(t,real(x),âLinewidthâ,2);grid
xlabel(âTiempo (sec)â);ylabel(âAmplitudâ);
title(âReal(Exp.compleja) (C=1, a=0.5+j2pi)â)
subplot(324),plot(t,imag(x),âLinewidthâ,2);
xlabel(âTiempo (sec)â);ylabel(âAmplitudâ);
title(âImag(Exp.compleja) (C=1, a=0.5+j2pi)â)
%Exponencial Compleja creciente
c=1; r=0.5+j*2*pi;
x=c*exp(r*t);
subplot(325),plot(t,real(x),âLinewidthâ,2); grid
xlabel(âTiempo (sec)â);ylabel(âAmplitudâ);
title(âReal(Exp.compleja) (C=1, a=0.5+j2pi)â)
subplot(326),plot(t,imag(x),âLinewidthâ,2);
xlabel(âTiempo (sec)â);ylabel(âAmplitudâ);
title(âImag(Exp.compleja) (C=1, a=0.5+j2pi)â)
SoluciÃģn
%FunciÃģn escalon
function u = us(t)
u = + 1.*(t>=0);
t=-1:0.01:5;
plot(t,us(t),âLinewidthâ,2); grid
SoluciÃģn
function x=rect(t)
x=1.*(abs(t)<.5);
t=-1:0.01:1;
plot(t,rect(t),âLinewidthâ,2); grid
Señales en TC y en TD nivel intermedio:
Verifique que conforme el escalamiento, en amplitud y tiempo, se incrementan, la seÃąal tiende a las caracterÃsticas ideales del impulso unitario. Grafique en el intervalo â ââ 1â âĪâ tâ âĪâ 1.
SoluciÃģn
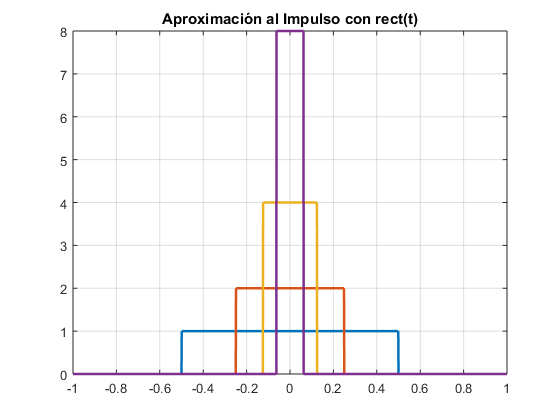
t=-1:0.001:1;
plot(t,rect(t),t,2*rect(2*t),t,4*rect(4*t),t,8*rect(8*t),âLinewidthâ,2);
grid
title(âAproximaciÃģn al Impulso con rect(t)â)
Defina una funciÃģn ud(n) que evalÚe la secuencia escalÃģn unitario u[n], EcuaciÃģn 1.18, cuyo parÃĄmetro de entrada sea el vector de tiempo discreto n. Con la funciÃģn definida, grafique la seÃąal en el intervalo â ââ 2â âĪâ nâ âĪâ 6.
SoluciÃģn
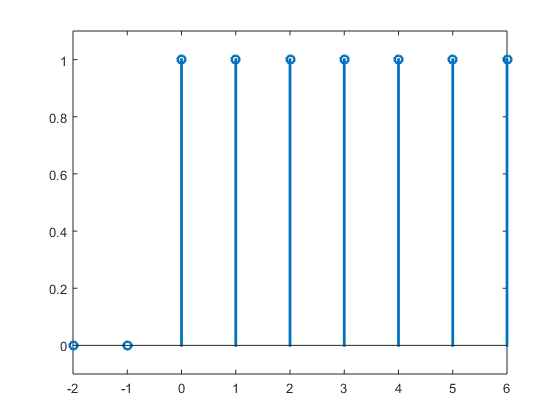
function x=ud(n)
x=1.*(n>=0);
n=-2:6;
stem(n,ud(n),âLinewidthâ,2)
SoluciÃģn
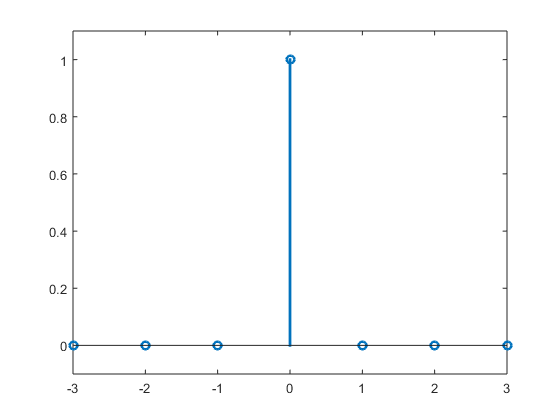
function u=dd(n) %muestra discreta
u=1*(n==0);
n=-3:3;
stem(n,dd(n),âLinewidthâ,2)
Señales en TC y en TD nivel avanzado:
SoluciÃģn
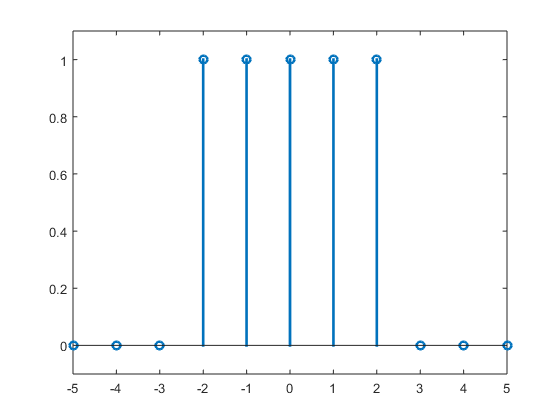
function r=rectd(n,Nw)
r=ud(n+Nw)-ud(n-Nw-1);
n=-5:5;
stem(n,rectd(n,2),âLinewidthâ,2)
SoluciÃģn
% trend.m
n=-10:10;
i=0;
iu=0;
for i = n;
iu=iu+dd(n-(4.*i));
end;
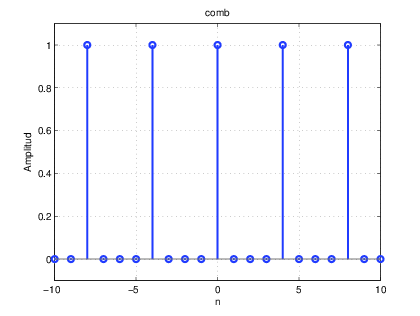
stem(n,iu,âLineWidthâ,2);axis([-10 10 -0.1 1.1]);
grid;xlabel(ânâ);ylabel(âAmplitudâ),title(âTren de impulsos discretosâ)
SoluciÃģn
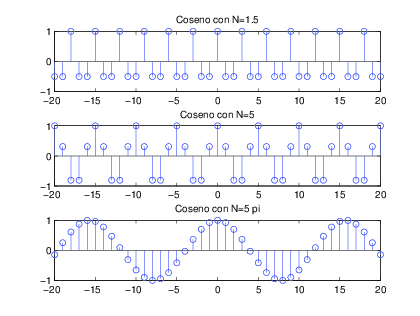
%expo1.m
n=-20:20;
N=[1.5 5 5*pi];
x1=exp(j*2*pi*n/N(1));
x2=exp(j*2*pi*n/N(2));
x3=exp(j*2*pi*n/N(3));
subplot(311),stem(n,real(x1)); title(âCoseno con N=1.5â)
subplot(312),stem(n,real(x2)); title(âCoseno con N=5â)
subplot(313),stem(n,real(x3)); title(âCoseno con N=5 piâ)
Se observa en la primera grÃĄfica que con Nâ =â 1.5 la seÃąal coseno es periodica, sin embargo, el periodo es Nâ =â 3, esto es debido a que N debe ser entero. Es decir, el periodo se obtiene como
En la segunda grÃĄfica el coseno es periÃģdico con Nâ =â 5, es decir, que con mâ =â 1, Nâ =â 5.
En la tercera grÃĄfica se observa que el coseno es una seÃąal aperiÃģdica, ya que no existe m entero con el que se obtiene el mÃnimo N entero.
De lo anterior se concluye que NO todas las exponenciales complejas en tiempo discreto son perÃģdicas.
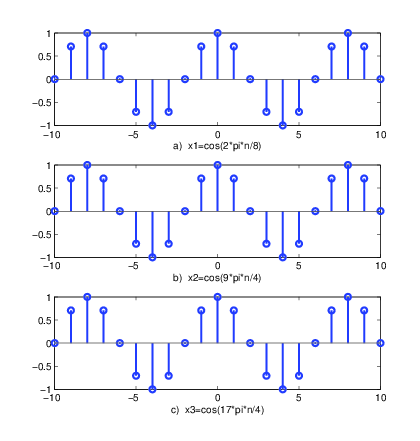
% expo2.m
n=-10:10;
x1=cos(2*pi*n/8);
x2=cos(9*pi*n/4);
x3=cos(17*pi*n/4);
subplot(311),stem(n,x1,âLineWidthâ,2); xlabel(âa) x1=cos(2*pi*n/8)â)
subplot(312),stem(n,x2,âLineWidthâ,2); xlabel(âb) x2=cos(9*pi*n/4)â)
subplot(313),stem(n,x3,âLineWidthâ,2); xlabel(âc) x3=cos(17*pi*n/4)â)
10. b)
10. c)
Sistemas:
En los ejemplos con soluciÃģn de esta secciÃģn se abordan conceptos de identificaciÃģn de sistemas continuos y discretos. Se presentan las propiedades de los sistemas: linealidad, invariancia en el tiempo, causalidad y estabilidad externa.
Selecciona la dificultad en las caritas de la izquierda.
Sistemas nivel principiante:
Para los siguientes sistemas indique si el sistema es:
a) BIBOâestable
b) Causal
c) Invariante en el tiempo
d) Lineal
Ejercicio 1:
|
1)
|
y[n]
|
â
=â
|
H{x[n]}
|
|
â
=â
|
|x[n]|
|
SoluciÃģn 1)
a) El sistema es BIBOâestable, pues el valor absoluto de una seÃąal acotada tambiÃĐn serÃĄ acotado.
b) El sistema es causal, pues, para cualquier valor de n, el valor absoluto de la seÃąal de entrada evaluada en n, sÃģlo depende de la n misma.
c) Para mostrar si el sistema es invariable, primero se obtiene la salida del sistema cuando x[n] se traslada k unidades; se denota dicha salida como yi[n]; esto es:
d) Para saber si el sistema es lineal, se utiliza la siguiente propiedad de valor absoluto: |aâ +â b|â âĪâ |a|â +â |b|.
Primero se define la seÃąal yi[n] como:
Ejercicio 2:
|
2)
|
y[n]
|
â
=â
|
H{x[n]}
|
|
â
=â
|
mediana(x[nâ
ââ
1],â
x[n],â
x[nâ
+â
1]);Â aâ
âĪâ
nâ
âĪâ
b
|
Nota: en este sistema, para determinar y[a] y y[b], el sistema tendrÃa acceso a la seÃąal de entrada en nâ =â aâ ââ 1 y en nâ =â bâ +â 1, respectivamente, por lo cual, se asume que x[nâ =â aâ ââ 1]â =â x[nâ =â a] y que x[bâ +â 1]â =â x[b].
SoluciÃģn 2)
a) El sistema es BIBOâestable, pues la mediana de una seÃąal acotada siempre serÃĄ acotada.
b) El sistema es no causal, pues tiene como argumento a los valores x[nâ +â 1].
c) Para saber si el sistema es invariable, primero se obtiene la salida del sistema cuando x[n] se traslada k unidades; dicha salida se denotarÃĄ como yi[n]; esto es:
d) Para saber si el sistema es lineal se considera que se tienen N seÃąales de entrada diferentes, denotadas como: xi[n], 1â âĪâ iâ âĪâ N, y que la salida para cada una de estas seÃąales se denota como: yi[n]; esto es:
Entonces, el sistema serÃa lineal, si y sÃģlo si,
La ecuaciÃģn anterior nos indica que la mediana de xi[kâ ââ 1], xi[k] y xi[kâ +â 1], para cualquier valor i, siempre tendrÃa que ser xi[kâ ââ 1]; sin embargo, dado que estas seÃąales xi[n] son arbitrarias, siempre serÃĄ posible incrementar el nÚmero de seÃąales para hacer que esta condiciÃģn no se cumpla; lo cual, lleva a concluir que el sistema es no lineal.
Sistemas nivel intermedio:
Para el sistema H que se define a continuaciÃģn, determine grÃĄfica y algebraicamente, si el sistema es lineal e invariante en el tiempo.
Para verificar si el sistema es invariante en n, primero se traslada a la seÃąal de entrada x[n] en k unidades; dicha transformaciÃģn se denota como: x[n]â ââ x[nâ ââ k]; consecuentemente: x[nâ ââ 1]â ââ x[nâ ââ 1â ââ k] y, sea yi[n] la salida del sistema para la entrada x[nâ ââ k]; esto es:
Para verificar si el sistema es lineal, primero se define el conjunto de seÃąales yi[n]; tales que:
Posteriormente, se hace la suma de las seÃąales yi[n]; esto es:
Por otra parte, se define a y0[n] como:
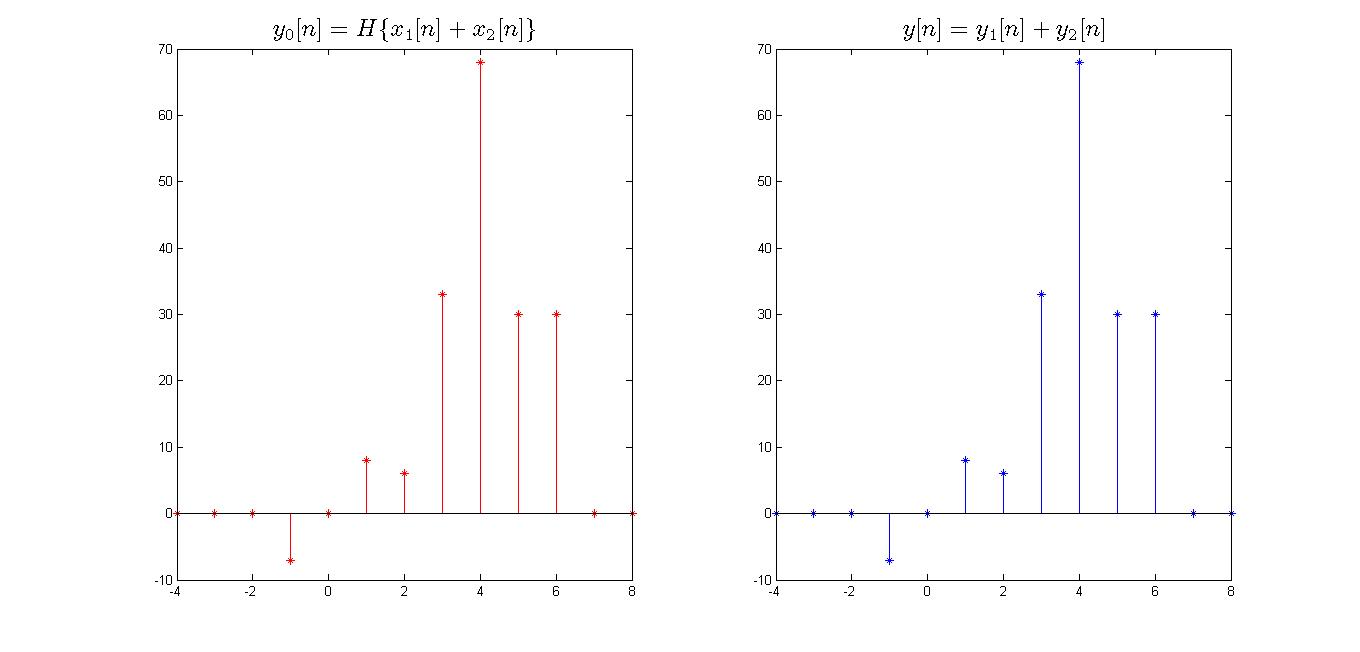
A continuaciÃģn, se presenta una corroboraciÃģn grÃĄfica de los resultados obtenidos. Para resolver la parte de invariabilidad se propone el siguiente programa:
Sea y1[n] la seÃąal de salida ante una entrada arbitraria x1[n], la cual, se propone como:
x1[n]â =â [4,â 6,â 3,â 1,â 5,â 9,â 2,â 4]; â ââ 2â âĪâ nâ âĪâ 5
nota: suponga que x1[n]â =â 0 para nâ âĪâ 0âŠnâ âĨâ 6.
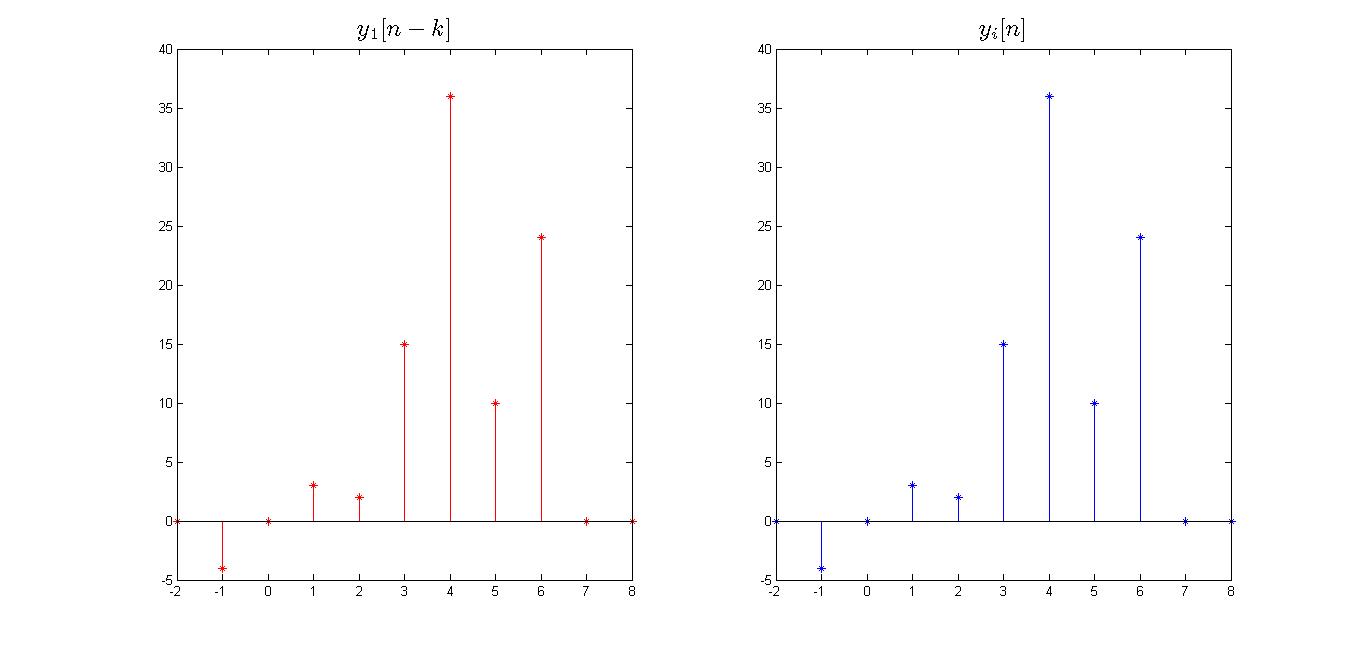
Posteriormente, se traslada la seÃąal y1[n] kâunidades para obtener la seÃąal y1[nâ ââ k]: Nota: en el programa que se muestra a continuaciÃģn se propuso kâ =â â ââ 2
Paralelamente a este proceso, se obtiene la seÃąal yi[n]; la cual, es la salida del sistema ante la seÃąal de entrada x1[n] trasladada en kâunidades; esto es: yi[n]â =â H{x1[nâ ââ k]}.
CÃģdigo en matlab:
n=[-4,-3,-2,-1,0,1,2,3,4,5,6,7,8];
â
%--------------------------------------------%
%Definir la seÃąal de entrada x1[n]
%n--> -4 -3 -2 -1 0 1 2 3 4 5 6 7 8
x1=[0 0 4 6 3 1 5 9 2 4 0 0 0];
â
%--------------------------------------------%
%Obtener tamaÃąo de la seÃąales x1[n]
N=length(x1);
â
%--------------------------------------------%
%Obtener y1[n]; y1[n]=(n)x1[n-1]
for ii=2:1:N
y1(ii) = (n(ii))*x1(ii-1);
end
â
%--------------------------------------------%
%Trasladar, en n, a y1[n] k-unidades;
%y1[n] --> y1[n-k]=y1_trasladada
â
%Definir k
k=-2;
%Trasladar
y1_trasladada=y1(-k+1:end);
â
%--------------------------------------------%
%obtener yi[n]; yi[n]=H{x[n-k]}=(n-k)x[n-k-1]
for ii=1:1:N+k
yi(ii) = (n(ii-k))*x1(ii-k-1);
end
â
%--------------------------------------------%
%Graficar y1[n+1] y yi[n]
â
%GrÃĄfica de y1[n+1]
subplot(1,2,1)
stem(n(-k+1:end),y1_trasladada,â*-râ)
â
%GrÃĄfica de yi[n]
subplot(1,2,2)
stem(n(-k+1:end),yi,â*-â)
Para corroborar que el sistema sea lineal ante 2 seÃąales de entrada particulares, se propone a x1[n] y x2[n] como dichas seÃąales particulares de entrada; en donde:
x1[n]â =â [4,â 6,â 3,â 1,â 5,â 9,â 2,â 4]; â ââ 2â âĪâ nâ âĪâ 5
x2[n]â =â [3,â 4,â 5,â 2,â 6,â 8,â 4,â 1]; â ââ 2â âĪâ nâ âĪâ 5
nota: suponga que x1[n]â =â x2[n]â =â 0 para nâ âĪâ 0âŠnâ âĨâ 6.
De esta forma, se obtiene a y0[n] como la seÃąal de salida ante la entrada al sistema de la suma de x1[n] y x2[n]; por otra parte, se obtiene la suma de y1[n] con y2[n]; donde y1[n] y y2[n] son las seÃąales de salida para las entradas x1[n] y x2[n], respectivamente. Finalmente, al comparar las grÃĄficas de y0[n] y y1[n]â +â y2[n] se puede observar que el sistema es lineal ante las entradas x1[n] y x2[n].
CÃģdigo en matlab:
n=[-4,-3,-2,-1,0,1,2,3,4,5,6,7,8];
â
%--------------------------------------------%
%Definir las seÃąal de entrada x1[n] y x2[n]
%n--> -4 -3 -2 -1 0 1 2 3 4 5 6 7 8
x1=[0 0 4 6 3 1 5 9 2 4 0 0 0];
x2=[0 0 3 4 5 2 6 8 4 1 0 0 0];
â
%--------------------------------------------%
%Obtener tamaÃąo de las seÃąales
N=length(x1);
â
%--------------------------------------------%
%Obtener y0[n]=H{x1[n]+x2[n]}
x1MASx2 = x1+x2;
for k=2:1:N
y0(k)=(n(k))*x1MASx2(k-1);
end
â
%--------------------------------------------%
%Obtener y1[n] y y2[n]
for k=2:1:N
y1(k) = (n(k))*x1(k-1);
y2(k) = (n(k))*x2(k-1);
end
â
%--------------------------------------------%
%Sumar y1[n] y y2[n]; y=y1[n]+y2[n]
y = y1+y2;
â
%--------------------------------------------%
%Graficar y0[n] y y[n]
â
%GrÃĄfica de y0[n]
subplot(1,2,1)
stem(n,y0,â*-râ)
â
%GrÃĄfica de y[n]
subplot(1,2,2)
stem(n,y,â*-â)
Sistemas nivel avanzado:
- y[n]â =â x[n]â +â x[â ââ nâ ââ 1]
- y[n]â =â x[n]â ââ x[â ââ nâ +â 1]
- y[n]â =â u[n]x[n]
- y[n]â =â â§âĻâĐ x[n] x[n]â âĨâ 0 â â â â ââ x[n] x[n]â <â 0 âŦâŽâ
- y[n]â =â ânkâ =â â ââ â(0.5)nâ ââ kx[k]
- y(t)â =â bâŦx(t) dt
- y[n]â =â x[nâ +â 1]â +â x[â ââ nâ +â 1]
- y[n]â =â x[nâ +â 1]x[â ââ nâ +â 1]
- y[n]â =â Par{x[n]}â +â x[nâ ââ 1]
- y[n]â =â Impar{x[n]}â ââ x[â ââ nâ +â 1]
Linealidad
y[n]â =â x[n]â +â x[â ââ nâ ââ 1] â
Se proponen tres entradas x1[n], x2[n] y x3[n]â =â x1[n]â +â x2[n], entonces las respectivas salidas son
y1[n]â =â x1[n]â +â x1[â ââ nâ ââ 1] â y2[n]â =â x2[n]â +â x2[â ââ nâ ââ 1] â y3[n]â =â x3[n]â +â x3[â ââ nâ ââ 1] â y3[n]â =â x1[n]â +â x2[n]â +â x1[â ââ nâ ââ 1]â +â x2[â ââ nâ ââ 1] â y tambiÃĐn â y3[n]â =â y1[n]â +â y2[n] â âīEs lineal
Se propone una nueva seÃąal x1[n] que es la original desplazada, con la que se obtiene la salida y1[n]
Se observa que salidas en tiempos presentes requieren de entradas en tiempos pasados y en tiempos futuros,
y[n]â =â x[n]â ââ x[â ââ nâ +â 1] â
Se proponen tres entradas x1[n], x2[n] y x3[n]â =â x1[n]â +â x2[n], entonces las respectivas salidas son
y1[n]â =â x1[n]â ââ x1[â ââ nâ +â 1] â y2[n]â =â x2[n]â ââ x2[â ââ nâ +â 1] â y3[n]â =â x3[n]â ââ x3[â ââ nâ +â 1] â y3[n]â =â x1[n]â +â x2[n]â ââ x1[â ââ nâ +â 1]â ââ x2[â ââ nâ +â 1] â y tambiÃĐn â y3[n]â =â y1[n]â +â y2[n] â âīEl sistema es lineal
y[n]â =â u[n]x[n] â y[â ââ 1]â =â u[â ââ 1]x[â ââ 1]â =â 0 â y[0]â =â u[0]x[0]â =â x[0] â y[1]â =â u[1]x[1]â =â x[1] â y[2]â =â u[2]x[2]â =â x[2] â ... â
Ya que la salida no depende de la entrada en instantes futuros el sistema es causal o no anticipativo.
El Sistema es estÃĄtico o sin memoria debido a que depende la salida depende de la entrada en el mismo instante.
Se propone una entrada acotada en amplitud, como por ejemplo un escalÃģn unitario. El sistema es estable BIBO ya que una multiplicaciÃģn de escalones siempre serÃĄ acotada en amplitud.
Si la seÃąal de entrada se desplaza un tiempo n0, ese deslazamiento se verÃĄ reflejado en la salida.
El sistema es Causal o no anticipativo, debido a que la salida sÃģlo depende de la entrada en los mismos instantes, es decir, no depende de instantes posteriores.
El sistema es sin memoria, pues sÃģlo depende de valores presentes de la entrada.
El sistema es estable BIBO ya que a una entrada acotada propuesta genera una salida acotada.
La estabilidad BIBO implica entradas acotadas, salidas acotadas, de manera que si se aplica al sistema una entrada escalÃģn se obtendrÃĄ a la salida una rampa, la integral del escalÃģn. Por lo tanto el sistema no es estable desde el punto de vista BIBO.
y[n]â =â x[nâ +â 1]â +â x[â ââ nâ +â 1]
Analizando la estabilidad BIBO del sistema, se tiene que es estable BIBO debido a que la suma de dos seÃąales acotadas genera una seÃąal tambien acotada.
Analizando la linealidad del sistema, se tiene que:
x[nâ +â 1]â =â x[nâ ââ n0â +â 1] â x[â ââ nâ +â 1]â =â x[â ââ nâ +â 1â ââ n0] â
Evaluando en distintos instantes de tiepo, se tiene:
Considerando una seÃąal de entrada acotada en amplitud, se observa que la suma de tres seÃąales acotadas siempre generarÃĄ una seÃąal acotada, por lo tanto el sistema es estable BIBO.
Considerando una seÃąal de entrada acotada en amplitud, se observa que la suma de tres seÃąales acotadas siempre generarÃĄ una seÃąal acotada, por lo tanto el sistema es estable BIBO.
Sistemas Lineales Invariantes en el Tiempo en TC:
En los ejemplos con soluciÃģn de esta secciÃģn se abordan conceptos, caracterÃsticas y formas de anÃĄlisis fundamentales de los sistemas lineales e invariantes en el tiempo continuo. Se lleva a cabo el anÃĄlisis de sistemas al obtener la respuesta de sistemas lineales e invariantes, mediante la integral de convoluciÃģn y la transformada de la Laplace.
Selecciona la dificultad en las caritas de la izquierda.
Sistemas Lineales Invariantes en el Tiempo en TC nivel principiante:
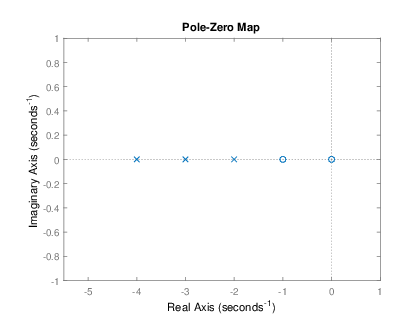
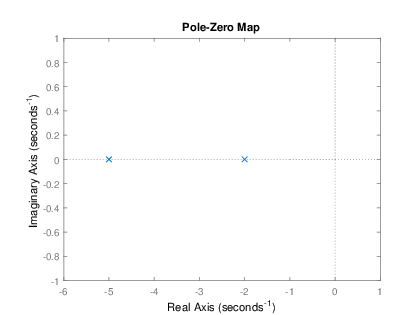
Suponga que se tiene la siguiente funciÃģn de transferencia de un sistema, grafique el patrÃģn de polos y ceros:
, cuyas raÃces o ceros son: y
, cuyas raÃces o polos son: , y
El patrÃģn de polos y ceros es el siguiente:
Sistemas Lineales Invariantes en el Tiempo en TC nivel intermedio:
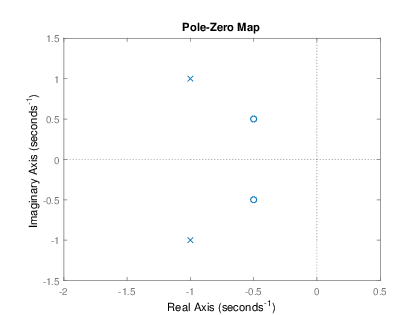
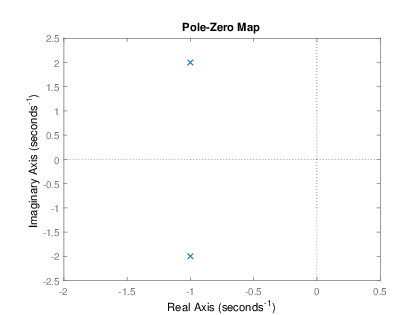
Considere la siguiente funciÃģn de transferencia de un sistema, grafique el patrÃģn de polos y ceros:
Se calculan las raÃces de los polinomios P(s) y Q(s) de la funciÃģn de transferencia:
, cuyas raÃces o ceros son complejas conjugadas: y
, cuyas raÃces o polos son complejas conjugadas: y
El patrÃģn de polos y ceros es el siguiente:
Sistemas Lineales Invariantes en el Tiempo en TC nivel avanzado:
- La funciÃģn de transferencia, H(s).
- La respuesta el impulso, h(t), el valor de Îū y el comportamiento del sistema.
- El diagrama de polos y ceros.
- La respuesta y(t) si la entrada es un escalÃģn, x(t)â =â u(t).
- La respuesta y(t) si la entrada es un escalÃģn, x(t)â =â u(t), y el sistema tiene las condiciones iniciales de y(0)â =â 1 y yâ(0)â =â 0.
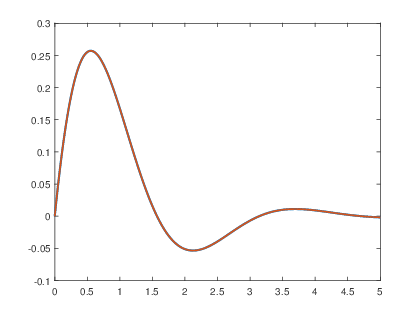
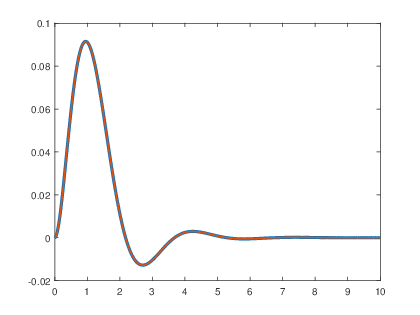
- La respuesta y(t) si la entrada es una seÃąal exponencial, y el sistema no tiene las condiciones iniciales.
- La respuesta y(t) si la entrada es una seÃąal exponencial, y el sistema no tiene condiciones iniciales.
Con kâ
=â
6
Ya que H(s) es una funciÃģn propia, es decir, mâ <â n, las raÃces son reales y diferentes s1â =â â ââ 2 y s2â =â â ââ 5, por lo que se tiene el caso de polos simples con los cuales se puede expresar la funciÃģn de transferencia mediante factores como
y
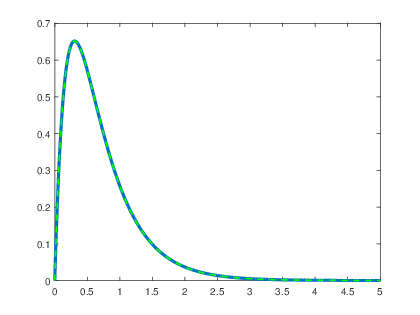
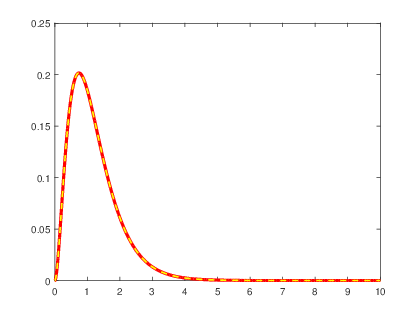
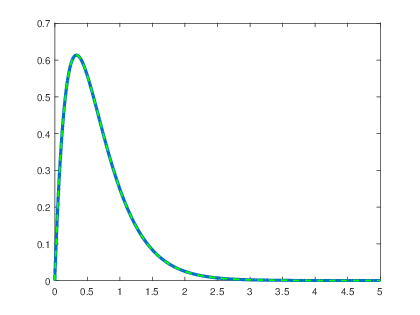
Se verifica la respuesta mediante simulaciÃģn obteniendo la grÃĄfica de la respuesta al impulso por medio de la funciÃģn impulse() y se compara con la grÃĄfica del resultado obtenido anteriormente.
>> a=[1 7 10];
>> b=6;
>> t=0:0.001:5;
>> h=impulse(b,a,t);
>> plot(t,h,âlinewidthâ,3);
>> hold on
>>x=(-2.*exp(-5.*t)+2.*exp(-2.*t)).*us(t);
>> plot(t,x,âg--â,âlinewidthâ,1.5);
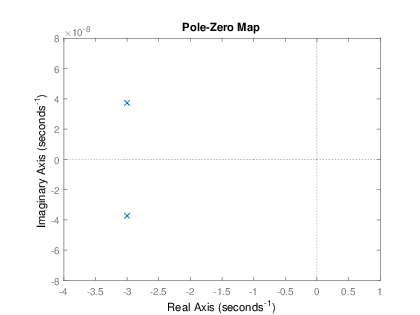
>> a=[1 7 10];
>> b=6;
>> pzmap(b,a);
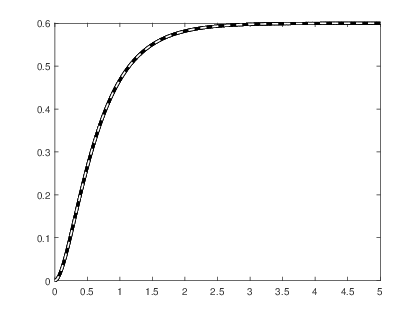
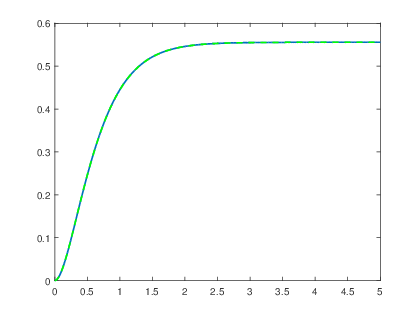
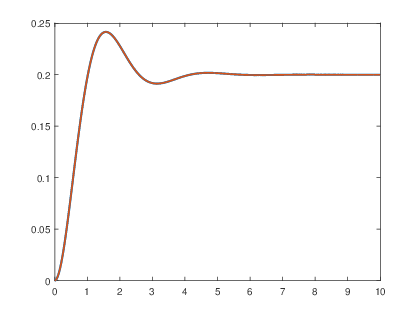
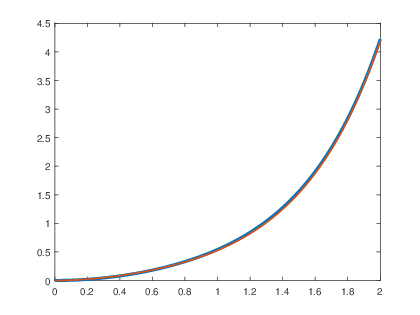
4) El comportamiento y(t) si la entrada es un escalÃģn, x(t)â =â u(t), es decir, la respuestadel de estado cero:
Encontrando, mediante expansiÃģn en fracciones parciales, que los coeficientes A, B y C son :
Por lo que
En donde la respuesta permanentes es
y la respuesta tranasitoria es
Obteniendo la grÃĄfica de la respuesta al escalÃģn por medio de la funciÃģn step() de Matlab y verificÃĄndola con la respuesta que se obtiene:
>> a=[1 7 10];
>> b=6;
>> t=0:0.001:5;
>> s=step(b,a,t);
>> plot(t,s,âkâ,âlinewidthâ,3);
>> hold on
>> x=(((2/5).*exp(-5.*t))-(exp(-2.*t))+(3/5)).*us(t);
>> plot(t,x,âw--â,âlinewidthâ,1.5);
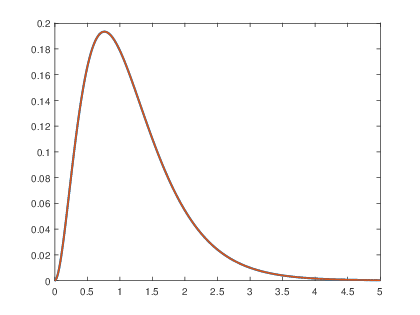
o bien
En el inciso anterior se obtuvo la transformada inversa de Laplace del primer tÃĐrmino de Y(s), por lo que ahora sÃģlo se obtiene la transformada inversa de Laplace para el segundo tÃĐrmino:
en donde la respuesta de estado cero es:
de manera que
Por lo tanto:
Aplicando la transformada inversa de Laplace a Y(s) se obtiene:
>> a=[1 7 10];
>>b=6;
>>t=0:0.001:10;
>>f=exp(-2.*t).*us(t);
>>y=lsim(b,a,f,t);
>>plot(t,y,ârâ,âlinewidthâ,3);
>>hold on
>>x=((2/3).*exp(-5.*t)-(2/3).*exp(-2.*t)+2.*t.*exp(-2.*t)).*us(t);
>>plot(t,x,ây--â,âlinewidthâ,1.5);
de manera que
Por lo tanto:
Aplicando la transformada inversa de Laplace a Y(s) se obtiene:
Se verifica que la respuesta obtenida corresponde con la simulada utilizando las funciones exp() y lsim():
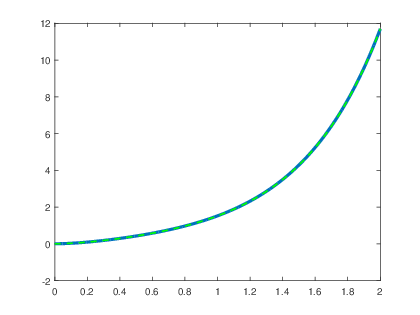
>> a=[1 7 10];
>> b=6;
>> t=0:0.001:2;
>> f=exp(2.*t).*us(t);
>> y=lsim(b,a,f,t);
>>plot(t,y,âlinewidthâ,3);
>>hold on
>>x=((2/7).*exp(-5.*t)-0.5.*exp(-2.*t)+(3/14).*exp(2.*t)).*us(t);
>>plot(t,x,âg--â,âlinewidthâ,1.5);
Con kâ =â 5
Ya que H(s) es una funciÃģn propia, es decir, mâ <â n, las raÃces son reales e iguales, s1â =â s2â ââ 3, por lo que se tiene el caso de polos simples iguales con los cuales se puede expresar la funciÃģn de transferencia mediante un factor duplicado como
A partir deH(s) se determina Ïn y Îū.
y
Se verifica la respuesta con Matlab obteniendo la grÃĄfica de la respuesta al impulso por medio de la funciÃģn impulse() y se compara con la grÃĄfica del resultado obtenido anteriormente.
>> a=[1 6 9]; >> b=5; >> t=0:0.001:5; >> h=impulse(b,a,t); >> plot(t,h,âlinewidthâ,3); >> hold on >> x=5.*t.*exp(-3.*t).*us(t); >> plot(t,x,âg--â,âlinewidthâ,1.5);
>> a=[1 6 9]; >> b=5; >> pzmap(b,a);
4) La respuesta y(t) si la entrada es un escalÃģn, x(t)â =â u(t), la cual corresponde a una respuesta de estado cero.
Encontrando, mediante expansiÃģn en fracciones parciales, que los coeficientes A, B y C son :
Por lo que
En donde la respuesta permanente es
y la respuesta transitoria es
La grÃĄfica de la respuesta al escalÃģn se obtiene por medio de la funciÃģn step() de Matlab y se verifica con la respuesta que se obtuvo:
>> a=[1 6 9]; >> b=5; >> t=0:0.001:5; >> s=step(b,a,t); >> hold on >> x=(-(5/3).*t.*exp(-3.*t)-(5/9).*exp(-3.*t)+(5/9)).*us(t); >> plot(t,s,t,x,âw--â,âlinewidthâ,1.5);
o bien
La respuesta de entrada cero corresponde al segundo tÃĐrmino, a la que se encuentra su transformada inversa
en donde la respuesta de estado cero es:
de manera que
Por lo tanto:
Aplicando la transformada inversa de Laplace a Y(s) se obtiene:
>> a=[1 6 9]; >> b=5; >> t=0:0.001:5; >> f=exp(-2.*t).*us(t); >> y=lsim(b,a,f,t); >> plot(t,y,âkâ,âlinewidthâ,3); >> hold on >> x=(5.*(-t.*exp(-3.*t)-exp(-3.*t)+exp(-2.*t))).*us(t); >> plot(t,x,ây--â,âlinewidthâ,1.5); â
de manera que
Por lo tanto:
Aplicando la transformada inversa de Laplace a Y(s) se obtiene:
>> a=[1 6 9]; >> b=5; >> t=0:0.001:5; >> f=exp(2.*t).*us(t); >> y=lsim(b,a,f,t); >> plot(t,y,âlinewidthâ,3); >> hold on >> x=(-t.*exp(-3.*t)-(1/5).*exp(-3.*t)+(1/5).*exp(2.*t)).*us(t); >> plot(t,x,âg--â,âlinewidthâ,1.5);
Con kâ =â 1
y
Se verifica la respuesta mediante simulaciÃģn obteniendo la grÃĄfica de la respuesta al impulso por medio de la funciÃģn impulse() y se compara con la grÃĄfica del resultado obtenido anteriormente.
>> a=[1 2 5]; >> b=1; >> t=0:0.001:5; >> h=impulse(b,a,t); >>plot(t,h,âlinewidthâ,3) >>hold on >>x=0.5.*sin(2.*t).*exp(-t).*us(t); >>plot(t,x,âg--â,âlinewidthâ,1.5)
>> a=[1 2 5]; >> b=1; >> pzmap(b,a);
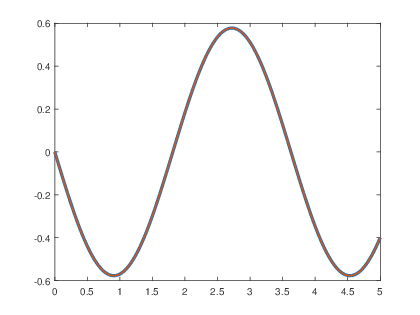
4) La respuesta y(t) si la entrada es un escalÃģn, x(t)â =â u(t), la cual corresponde a la respuesta de estado cero yzs(t), ya que no se incluyen condiciones iniciales.
En donde la respuesta permanentes es
y la respuesta transitoria es
Obteniendo la grÃĄfica de la respuesta al escalÃģn por medio de la funciÃģn step() de Matlab y verificÃĄndola con la respuesta que se obtiene:
>> a=[1 2 5]; >> b=1; >> t=0:0.01:10; >> s=step(b,a,t); >> plot(t,s,ârâ,âlinewidthâ,3); >> hold on >> x=(-0.2.*exp(-t).*cos(2.*t)-0.1.*exp(-t).*sin(2.*t)+0.2).*us(t); >> plot(t,x,ây--â,âlinewidthâ,1.5);
o bien
En el inciso anterior se obtuvo la transformada inversa de Laplace del primer tÃĐrmino de Y(s), por lo que ahora sÃģlo se obtiene la transformada inversa de Laplace para el segundo tÃĐrmino, la cual corresponde a la respuesta de entrada cero:
en donde la respuesta de estado cero ha sido determinada en el inciso anterior,
de manera que
Por lo tanto:
Aplicando la transformada inversa de Laplace a Y(s) se obtiene:
>> a=[1 2 5]; >>b=1; >>t=0:0.01:10; >>f=exp(-2.*t).*us(t); >>y=lsim(b,a,f,t); >>plot(t,y,âbâ,âlinewidthâ,3); >>hold on >>x=(-0.2.*exp(-t).*cos(2.*t)+0.1.*exp(-t).*sin(2.*t)+0.2.*exp(-2.*t)).*us(t); >>plot(t,x,âw--â,âlinewidthâ,1.5);
7) Si , la respuesta y(t) sin condiciones iniciales es:
de manera que
Por lo tanto:
Aplicando la transformada inversa de Laplace a Y(s) se obtiene:
>> a=[1 2 5]; >>b=1; >>t=0:0.01:10; >>f=exp(2.*t).*us(t); >>y=lsim(b,a,f,t); >>plot(t,y,âkâ,âlinewidthâ,3); >> hold on >>x=(-(1/13).*exp(-2.*t).*cos(t)-(4/13).*exp(-2.*t).*sin(t)+... (1/13).*exp(2.*t)).*us(t); >> plot(t,x,âw--â,âlinewidthâ,1.5);
Con kâ =â â ââ 1
En este caso las raÃces son imaginarias conjugadas , por lo que se tiene el caso de polos en el eje imaginario.
Se verifica la respuesta mediante simulaciÃģn obteniendo la grÃĄfica de la respuesta al impulso por medio de la funciÃģn impulse() y se compara con la grÃĄfica del resultado obtenido anteriormente.
>>a=[1 0 3];
>>b=-1;
>>c=sqrt(3);
>>t=0:0.001:5;
>>h=impulse(b,a,t);
p>>lot(t,h, âlinewidthâ,3);
>>hold on
>>x=(-1/c).*sin(c.*t).*us(t);
>>plot(t,x,âg--â,âlinewidthâ,1.5)
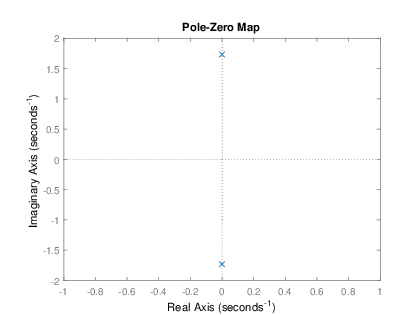
>> a=[1 0 3];
>> b=-1;
>> pzmap(b,a);
4) La respuesta y(t) si la entrada es un escalÃģn, x(t)â =â u(t), la cual corresponde a una respuesta de estado cero.
Encontrando, mediante expansiÃģn en fracciones parciales, que los coeficientes A, B y C son:
por lo que
En donde la respuesta permanentes tambiÃĐn es
y no hay respuesta transitoria.
La grÃĄfica de la respuesta al escalÃģn se obtiene por medio de la funciÃģn step(), la cual se verifica con la respuesta que obtenida analÃticamente:
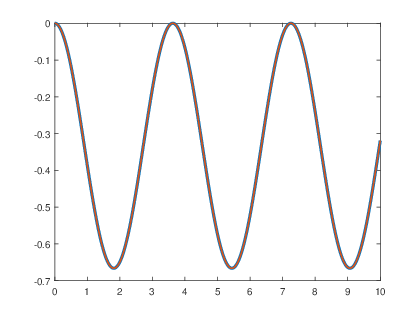
>> a=[1 0 3];
>> b=-1;
>>c=sqrt(3);
>> t=0:0.01:10;
>> s=step(b,a,t);
>> plot(t,s,ârâ,âlinewidthâ,3);
>> hold on
>> x=(-(1/3)+(1/3).*cos(c.*t)).*us(t);
>> plot(t,x,ây--â,âlinewidthâ,1.5);
o bien
En el inciso anterior se obtuvo la transformada inversa de Laplace del primer tÃĐrmino de Y(s), por lo que ahora sÃģlo se obtiene la transformada inversa de Laplace para el segundo tÃĐrmino:
en donde la respuesta de estado cero es:
de manera que
Por lo tanto:
Al obtener la transformada inversa de Laplace de Y(s) se encuentra
>>a=[1 0 3];
>>b=-1;
>>c=sqrt(3);
>>t=0:0.01:10;
>>f=exp(-2.*t).*us(t);
>>y=lsim(b,a,f,t);
>>plot(t,y,âbâ,âlinewidthâ,3);
>>hold on
>>x=(-(1/7).*exp(-2.*t)+(1/7).*cos(c.*t)-(2/(7.*c)).*sin(c.*t)).*us(t);
>>plot(t,x,âw--â,âlinewidthâ,1.5);
de manera que
Por lo tanto:
Aplicando la transformada inversa de Laplace a Y(s) se obtiene:
>>a=[1 0 3];
>>b=-1;
>>c=sqrt(3);
>>t=0:0.01:2;
>>f=exp(2.*t).*us(t);
>>y=lsim(b,a,f,t);
>>plot(t,y,âkâ,âlinewidthâ,3);
>>hold on
>>x=(-(1/7).*exp(-2.*t)+(1/7).*cos(c.*t)-(2/(7.*c)).*sin(c.*t)).*us(t);
>>plot(t,x,âw--â,âlinewidthâ,1.5);
Sistemas lineales e invariantes en el tiempo en TD:
En los ejemplos con soluciÃģn de esta secciÃģn se abordan conceptos, caracterÃsticas y formas de anÃĄlisis fundamentales de los sistemas lineales e invariantes en el tiempo discreto. Se lleva a cabo el anÃĄlisis de sistemas al obtener la respuesta de sistemas lineales e invariantes, mediante la suma de convoluciÃģn y la transformada Z.
Selecciona la dificultad en las caritas de la izquierda.
Sistemas lineales e invariantes en el tiempo en TD nivel principiante:
- Obtenga H(z) y diga si es o no estable el sistema.
- Determine el diagrama de bloques del sistema.
- Obtenga los primeros 5 valores de h[n] mediante recursividad.
- Obtenga la respuesta al escalÃģn mediante convoluciÃģn.
SoluciÃģn
-
Se tiene que h[n]â =â (1.5nâ +â 0.2nâ ââ 1)u[n]Aplicando leyes de los exponentes axâ +â yâ =â axayh[n]â =â (1.5nâ +â 0.2n0.2â ââ 1)u[n]h[n]â =â (1.5nâ +â 5(0.2)n)u[n]Se puede observar que h[n] tiene la forma de anu[n] y se sabe que la transformada de anu[n] esanu[n]â ââ (1)/(1â ââ azâ ââ 1)
EntoncesH(z)â =â (1)/(1â ââ 1.5zâ ââ 1)â +â (5)/(1â ââ 0.2zâ ââ 1)DesarrollandoH(z)â =â (1â ââ 0.2zâ ââ 1â +â 5â ââ 1.5zâ ââ 1)/((1â ââ 7.5zâ ââ 1)(1â ââ 0.2zâ ââ 1))Por lo que H(z)âīH(z)â =â (6â ââ 7.7zâ ââ 1)/((1â ââ 1.5zâ ââ 1)(1â ââ 0.2zâ ââ 1))â ââ H(z)â =â (6â ââ 7.7zâ ââ 1)/(1â ââ 1.7zâ ââ 1â +â 0.3zâ ââ 2)El sistema es inestable ya que una de sus raÃces es 1.5TambiÃĐn se puede observar por el diagrama de polos y ceros
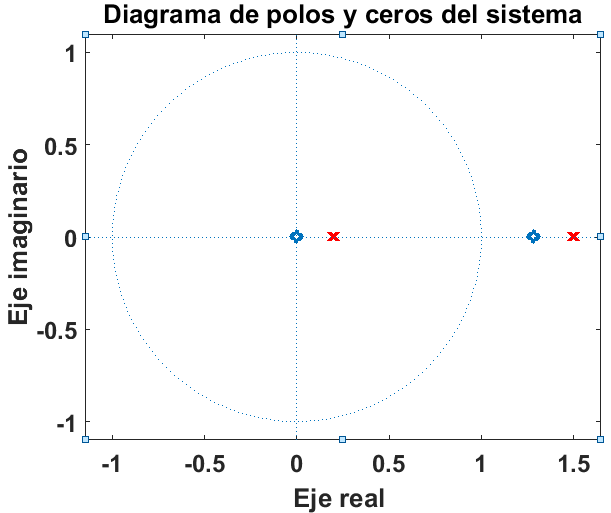 Figure 1.1âDiagrama de polos y ceros
Figure 1.1âDiagrama de polos y ceros
% Ejercicio 1 a=[1 -1.7 0.3]; b=[6 -7.7 0]; zplane(b,a); ylabel(âEje imaginarioâ); xlabel(âEje real â); title(âDiagrama de polos y ceros del sistemaâ);
-
De acuerdo a H(z)H(z)â =â (6â ââ 7.7zâ ââ 1)/(1â ââ 1.7zâ ââ 1â +â 0.3zâ ââ 2)Obteniendo la ecuaciÃģn en diferencias:y[n]â ââ 1.7y[nâ ââ 1]â +â 0.3y[nâ ââ 2]â =â 6x[n]â ââ 7.7x[nâ ââ 1] â y[n]â =â 1.7y[nâ ââ 1]â ââ 0.3y[nâ ââ 2]â +â 6x[n]â ââ 7.7x[nâ ââ 1]El diagrama de bloques:
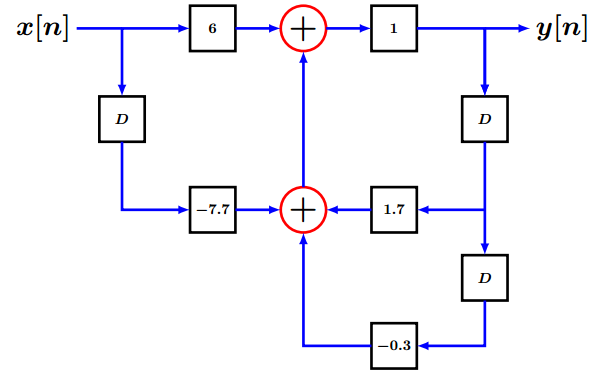 Figure 1.2âDiagrama de bloques.
Figure 1.2âDiagrama de bloques. -
Por el mÃĐtodo de recursividady[n]â =â 1.7y[nâ ââ 1]â ââ 0.3y[nâ ââ 2]â +â 6x[n]â ââ 7.7x[nâ ââ 1] â h[n]â =â 1.7h[nâ ââ 1]â ââ 0.3h[nâ ââ 2]â +â 6Îī[n]â ââ 7.7Îī[nâ ââ 1] â h[0]â =â 6 Îī[0]â =â 6 â h[1]â =â 1.7h[0]â ââ 7.7Îī[0]â =â 2.5 â h[2]â =â 1.7h[1]â ââ 0.3h[0]â =â 2.45 â h[3]â =â 1.7h[2]â ââ 0.3h[1]â =â 3.415 â h[4]â =â 1.7h[3]â ââ 0.3h[2]â =â 5.0705 â h[5]â =â 1.7h[4]â ââ 0.3h[3]â =â 7.59535
-
Si x[n]â
=â
u[n] y h[n]â
=â
(1.5nâ
+â
0.2nâ
ââ
1)u[n]Entoncesy[n]â =â x[n]*y[n] â y[n]â =â u[n]*y[n]Por conmutatividady[n]â =â h[n]*u[n]Aplicando la definiciÃģny[n]â =â h[n]*u[n] â y[n]â =â ââkâ =â â ââ âh[k]u[nâ ââ k] â y[n]â =â ââkâ =â â ââ â(1.5kâ +â 0.2kâ +â 1)u[k]u[nâ ââ k] â y[n]â =â ââkâ =â â ââ â1.5ku[k]u[nâ ââ k]â +â ââkâ =â â ââ â0.2kâ ââ 1u[k]u[nâ ââ k]Definiendo los lÃmitesu[n]â =â 1 nâ âĨâ 0; u[k]â =â 1 kâ âĨâ 0; u[nâ ââ k]â =â 1 nâ ââ kâ âĨâ 0; kâ âĪâ n â â â â â â â u[n]â =â 0 nâ <â 0 u[k]â =â 0 kâ <â 0 u[nâ ââ k]â =â 0 nâ ââ kâ <â 0; kâ >â nEntoncesy[n]â =â âēâģnkâ =â 01.5kâ +â âēâģnkâ =â 00.2kâ ââ 1y[n]â =â âēâģnkâ =â 01.5kâ +â 0.2â ââ 1âēâģnkâ =â 00.2kPor series singularâēâģnkâ =â 0akâ =â (1â ââ anâ +â 1)/(1â ââ a)y[n]â =â (1â ââ 1.5nâ +â 1)/(1â ââ 1.5)â +â (0.2â ââ 1)(1â ââ 0.2nâ +â 1)/(1â ââ 0.2) u[n]y[n]â =â â ââ 2(1â ââ (1.5)nâ +â 1)â +â 5((1â ââ (0.2)nâ +â 1))/((4)/(5)) u[n]El resultado es: y[n]â =â â ââ 2(1â ââ (1.5)nâ +â 1)â +â (25)/(4)(1â ââ (0.2)nâ +â 1) u[n]
- Obtenga H(z) y diga si es o no estable el sistema.
- Determine el diagrama de bloques del sistema.
- Obtenga los primeros 5 valores de h[n] mediante recursividad.
- Obtenga la respuesta al escalÃģn mediante convoluciÃģn.
SoluciÃģn
-
La respuesta h[n] tambiÃĐn puede expresarse comoh[n]â =â [(2)0.5nâ +â (5)0.2n)]u[n]Para determinar la estabilidad del sistema es necesario conocer el diagrama de polos y ceros, por lo tanto:Aplicando la transformada Z:2(0.5n)â =â (2)(1)/(1â ââ (1)/(2)zâ ââ 1) â 5(0.2n)â =â (5)(1)/(1â ââ (1)/(5)zâ ââ 1)Entonces:H(z)â =â (2)(1)/(1â ââ (1)/(2)zâ ââ 1)â +â (5)(1)/(1â ââ (1)/(5)zâ ââ 1)Sumando las fracciones:H(z)â =â (2ââ1â ââ (1)/(5)zâ ââ 1ââ â +â 5ââ1â ââ (1)/(2)zâ ââ 1ââ )/(ââ1â ââ (1)/(2)zâ ââ 1ââ ââ1â ââ (1)/(5)zâ ââ 1ââ ) â H(z)â =â (2â ââ (2)/(5)zâ ââ 1â +â 5â ââ (5)/(2)zâ ââ 1)/(1â ââ (1)/(2)zâ ââ 1â ââ (1)/(5)zâ ââ 1â +â (1)/(10)zâ ââ 2) â H(z)â =â (7â ââ (29)/(10)zâ ââ 1)/(1â ââ (7)/(10)zâ ââ 1â +â (1)/(10)zâ ââ 2)
Se llega a: y[n]â ââ (7)/(10)y[nâ ââ 1]â +â (1)/(10)y[nâ ââ 2]â =â 7x[n]â ââ (29)/(10)x[nâ ââ 1]Se analiza la estabilidad del sistema en donde los polos deben estar contenidos en el cÃrculo unitario:% Ejercicio 2 a=[1 -7/10 1/10]; b=[7 -29/10 0]; zplane(b,a); ylabel(âEje imaginarioâ); xlabel(âEje real â); title(âDiagrama de polos y ceros del sistemaâ);
-
De acuerdo con H(z)â
=â
(7â
ââ
(29)/(10)zâ
ââ
1)/(1â
ââ
(7)/(10)zâ
ââ
1â
+â
(1)/(10)zâ
ââ
2)
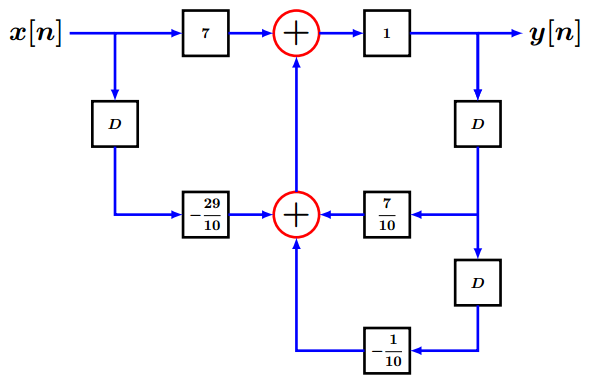 Figure 1.4âDiagrama de bloques.
Figure 1.4âDiagrama de bloques. -
Por el mÃĐtodo de recursividad.y[n]â =â 7x[n]â ââ (29)/(10)x[nâ ââ 1]â +â (7)/(10)y[nâ ââ 1]â ââ (1)/(10)y[nâ ââ 2]Como no hay condiciones iniciales y la entrada es Îī[n], se tiene que:h[0]â =â 7Îī[0]â ââ (29)/(10)Îī[â ââ 1]â +â (7)/(10)h[â ââ 1]â ââ (1)/(10)h[â ââ 2]â =â 7 â h[1]â =â 7Îī[1]â ââ (29)/(10)Îī[0]â +â (7)/(10)h[0]â ââ (1)/(10)h[â ââ 1]â =â 2 â h[2]â =â 7Îī[2]â ââ (29)/(10)Îī[1]â +â (7)/(10)h[1]â ââ (1)/(10)h[0]â =â 0.7 â h[3]â =â 7Îī[3]â ââ (29)/(10)Îī[2]â +â (7)/(10)h[2]â ââ (1)/(10)h[1]â =â 0.29 â h[4]â =â 7Îī[4]â ââ (29)/(10)Îī[3]â +â (7)/(10)h[3]â ââ (1)/(10)h[2]â =â 0.133 â h[5]â =â 7Îī[5]â ââ (29)/(10)Îī[4]â +â (7)/(10)h[4]â ââ (1)/(10)h[3]â =â 0.0641
-
Si x[n]â
=â
u[n] y h[n]â
=â
(0.5nâ
ââ
1â
+â
0.2nâ
ââ
1)u[n]y[n]â =â ââkâ =â â ââ â(h[k])(x[nâ ââ k]) â y[n]â =â âââ ââ ââĄâĢ2ââ(1)/(2)ââ nâ +â 5ââ(1)/(5)ââ nu[n]âĪâĶu[nâ ââ k] â y[n]â =â ââkâ =â â ââ â2ââ(1)/(2)ââ nu[n]u[nâ ââ k]â +â 5ââ(1)/(5)ââ nu[n]u[nâ ââ k] â y[n]â =â 2ââkâ =â â ââ âââ(1)/(2)ââ nu[n]u[nâ ââ k]â +â 5ââkâ =â â ââ âââ(1)/(5)ââ nu[n]u[nâ ââ k] â y[n]â =â 2ânkâ =â 0ââ(1)/(2)ââ nâ +â 5ânkâ =â 0ââ(1)/(5)ââ n â y[n]â =â âĄâĒâĒâĢ2(1â ââ (1)/(2)nâ +â 1)/(1â ââ (1)/(2))â +â 5(1â ââ (1)/(5)nâ +â 1)/(1â ââ (1)/(5))âĪâĨâĨâĶu[n]
Sistemas lineales e invariantes en el tiempo en TD nivel intermedio:
- Obtenga H(z) y diga si es o no estable el sistema.
- Determine el diagrama de bloques del sistema.
- Obtenga los primeros 5 valores de h[n] mediante recursividad.
- Obtenga la respuesta al escalÃģn mediante convoluciÃģn.
SoluciÃģn
-
De la funciÃģn discreta h[n]â
=â
(0.5nâ
+â
1â
+â
0.2nâ
ââ
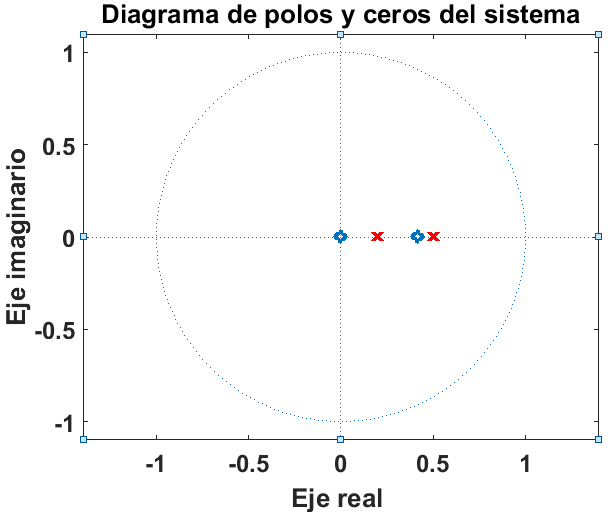
1)u[n] se tiene que:h[n]â =â (1)/(2)ââ(1)/(2)ââ nâ +â 5ââ(1)/(5)ââ n â H(z)â =â (1)/(2)âââ(z)/(zâ ââ (1)/(2))âââ â +â 5âââ(z)/(zâ ââ (1)/(5))âââObteniendo las raÃces: z1â =â (1)/(2)Â ;Â z2â =â (1)/(5)Como se observa, el sistema es estable ya que las raÃces del sistema caen dentro del cÃrculo unitario (su magnitud es menor a 1).
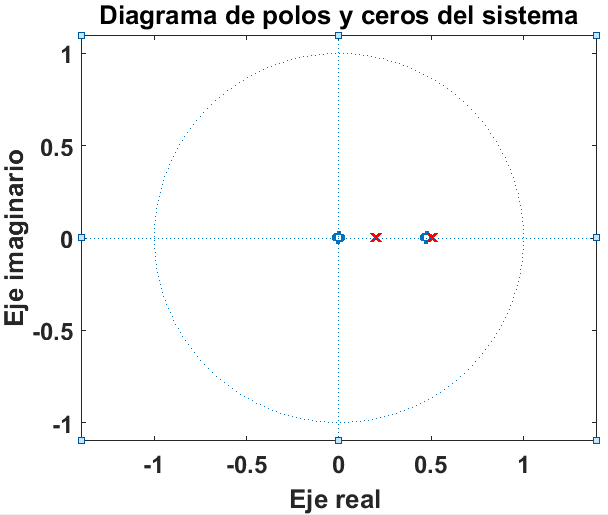 Figure 1.5âDiagrama de polos y ceros
Figure 1.5âDiagrama de polos y ceros
% Ejercicio 3 a=[1 -0.7 0.1]; b=[5.5 -2.6 0]; zplane(b,a); ylabel(âEje imaginarioâ); xlabel(âEje real â); title(âDiagrama de polos y ceros del sistemaâ);
-
Se reescribe la funciÃģn de transferencia y se tiene que:H(z)â =â 0.5ââ(1)/(1â ââ 0.5zâ ââ 1)ââ â +â 5ââ(1)/(1â ââ 0.2zâ ââ 1)ââDesarrollando la expresiÃģn:H(z)â =â (5.5â ââ 2.6zâ ââ 1)/(1â ââ 0.7zâ ââ 1â +â 0.1zâ ââ 2)Por lo que la ecuaciÃģn en diferencias queda como:0.1y[nâ ââ 2]â ââ 0.7y[nâ ââ 1]â +â y[n]â =â 5.5x[n]â ââ 2.6x[nâ ââ 1]Despejando y[n]:y[n]â =â â ââ 0.1y[nâ ââ 2]â +â 0.7y[nâ ââ 1]â ââ 2.6x[nâ ââ 1]â +â 5.5x[n]El diagrama de bloques de dicho sistema es:
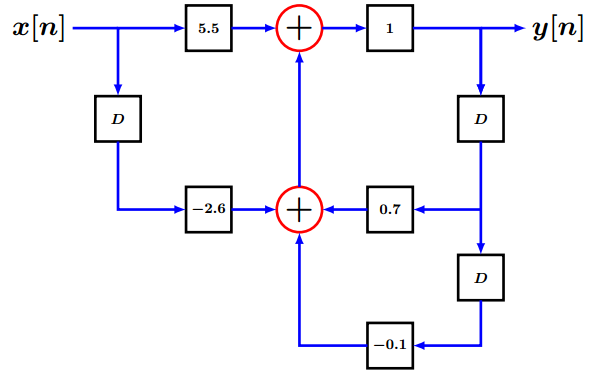 Figure 1.6âDiagrama de bloques.
Figure 1.6âDiagrama de bloques.
-
De la expresiÃģn anterior se obtuvo que:y[n]â =â â ââ 0.1y[nâ ââ 2]â +â 0.7y[nâ ââ 1]â ââ 2.6x[nâ ââ 1]â +â 5.5x[n]Si x[n]â =â Îī[n]:h[n]â =â â ââ 0.1h[nâ ââ 2]â +â 0.7h[nâ ââ 1]â ââ 2.6Îī[nâ ââ 1]â +â 5.5Îī[n]Por recursividad se obtiene que:h[0]â =â â ââ 0.1h[â ââ 2]â +â 0.7h[â ââ 1]â ââ 2.6Îī[â ââ 1]â +â 5.5Îī[0]â =â \bf5.5 â h[1]â =â â ââ 0.1h[â ââ 1]â +â 0.7h[0]â ââ 2.6Îī[0]â +â 5.5Îī[1]â =â (0.7*5.5)â ââ 2.5â =â \bf1.25 â h[2]â =â â ââ 0.1h[0]â +â 0.7h[1]â ââ 2.6Îī[1]â +â 5.5Îī[2]â =â (â ââ 0.1*5.5)â +â (0.7*1.25)â =â \bf0.325 â h[3]â =â â ââ 0.1h[1]â +â 0.7h[2]â ââ 2.6Îī[2]â +â 5.5Îī[3]â =â (â ââ 0.1*1.25)â +â (0.7*0.325)â =â \bf0.1025 â h[4]â =â â ââ 0.1h[2]â +â 0.7h[3]â ââ 2.6Îī[3]â +â 5.5Îī[4]â =â (â ââ 0.1*0.325)â +â (0.7*0.1025)â =â \bf0.03925 â
-
Se parte de h[n]â
=â
(0.5nâ
+â
1â
+â
0.2nâ
ââ
1)u[n]:x[n]â =â u[n] â y[n]â =â h[n]*x[n] â y[n]â =â ââkâ =â â ââ âh[k]x[nâ ââ k] â y[n]â =â ââkâ =â â ââ â(0.5kâ +â 1â +â 0.2kâ ââ 1)u[k]u[nâ ââ k] â y[n]â =â ââkâ =â â ââ â(0.5kâ +â 1u[k]u[nâ ââ k]â +â 0.2kâ ââ 1u[k]u[nâ ââ k]) â y[n]â =â (1)/(2)ââkâ =â â ââ â0.5ku[k]u[nâ ââ k]â +â 5ââkâ =â â ââ â0.2ku[k]u[nâ ââ k] â y[n]â =â (1)/(2)ânkâ =â 00.5kâ +â 5ânkâ =â 00.2k â y[n]â =â ââ(1)/(2)ââ(1â ââ 0.5nâ +â 1)/(1â ââ 0.5)ââ â +â 5ââ(1â ââ 0.2nâ +â 1)/(1â ââ 0.2)ââ ââ u[n] â y[n]â =â ââ0.5ââ(1â ââ 0.5nâ +â 1)/(0.5)ââ â +â 5ââ(1â ââ 0.2nâ +â 1)/(0.8)ââ ââ u[n] â y[n]â =â ââ1â +â (5)/(0.8)â ââ 0.5nâ +â 1â ââ (0.2n)/(0.8)ââ u[n] â y[n]â =â (7.25â ââ 0.5nâ +â 1â ââ 1.25(0.2n))u[n]
- Obtenga H(z) y diga si es o no estable el sistema.
- Determine el diagrama de bloques del sistema.
- Obtenga los primeros 5 valores de h[n] mediante recursividad.
- Obtenga la respuesta al escalÃģn mediante convoluciÃģn.
SoluciÃģn
-
Se parte de la funciÃģn discreta h[n]â
=â
(0.5nâ
+â
1â
+â
1.2nâ
+â
1)u[n]h[n]â =â 0.5nâ +â 1u[n]â +â 1.2nâ +â 1u[n] â h[n]â =â (0.5)0.5nu[n]â +â (1.2)1.2nu[n] â H(z)â =â (0.5)/(1â ââ 0.5zâ ââ 1)â +â (1.2)/(1â ââ 1.2zâ ââ 1) â H(z)â =â (0.5(1â ââ 1.2zâ ââ 1)â +â 1.2(1â ââ 0.5zâ ââ 1))/((1â ââ 0.5zâ ââ 1)(1â ââ 1.2zâ ââ 1)) â H(z)â =â (0.5â ââ 0.6zâ ââ 1â +â 1.2â ââ 0.6zâ ââ 1)/((1â ââ 0.5zâ ââ 1)(1â ââ 1.2zâ ââ 1)) â H(z)â =â (1.7â ââ 1.2zâ ââ 1)/((1â ââ 1.2zâ ââ 1)(1â ââ 0.5zâ ââ 1)) â H(z)â =â (1.7â ââ 1.2zâ ââ 1)/(1â ââ 1.2zâ ââ 1â ââ 0.5zâ ââ 1â +â 0.6zâ ââ 2) â H(z)â =â (1.7â ââ 1.2zâ ââ 1)/(1â ââ 1.7zâ ââ 1â +â 0.6zâ ââ 2)
% Ejercicio 4 a=[1 -1.7 0.6]; b=[1.7 -1.2 0]; zplane(b,a); ylabel(âEje imaginarioâ); xlabel(âEje real â); title(âDiagrama de polos y ceros del sistemaâ);
Como se observa en la imagen anterior el sistema es inestable, ya que un polo cae fuera del circulo unitario. -
De acuerdo con la funciÃģn de transferencia H(z)â
=â
(1.7â
ââ
1.2zâ
ââ
1)/(1â
ââ
1.7zâ
ââ
1â
+â
0.6zâ
ââ
2)
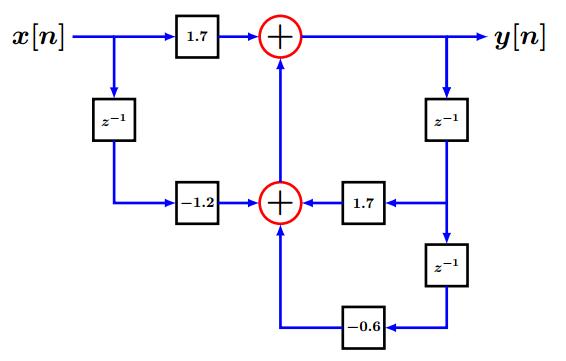 Figure 1.8âDiagrama de bloques.
Figure 1.8âDiagrama de bloques.
-
Mediante recursividad.H(z)â =â (1.7â ââ 1.2zâ ââ 1)/(1â ââ 1.7zâ ââ 1â +â 0.6zâ ââ 2)â =â (Y(z))/(X(z)) â h(z)(1â ââ 1.7zâ ââ 1â +â 0.6zâ ââ 2)â =â x(z)(1.7â ââ 1.2zâ ââ 1) â h(z)â ââ 1.7h(z)zâ ââ 1â +â 0.6h(z)zâ ââ 2â =â 1.7x(z)â ââ 1.2x(z)zâ ââ 1 â h[n]â ââ 1.7h[nâ ââ 1]â +â 0.6h[nâ ââ 2]â =â 1.7x[n]â ââ 1.2x[nâ ââ 1] â Con x[n]â =â Îī[n] â h[n]â =â 1.7h[nâ ââ 1]â ââ 0.6h[nâ ââ 2]â +â 1.7Îī[n]â ââ 1.2Îī[nâ ââ 1] â h[0]â =â 1.7h[â ââ 1]â ââ 0.6h[â ââ 2]â +â 1.7Îī[0]â ââ 1.2Îī[â ââ 1]â =â 1.7 â h[1]â =â 1.7h[0]â ââ 0.6h[â ââ 1]â +â 1.7Îī[1]â ââ 1.2Îī[0]â =â (1.7)(1.7)â +â 0â ââ 1.2â =â 1.69 â h[2]â =â 1.7h[1]â ââ 0.6h[0]â +â 1.7Îī[2]â ââ 1.2Îī[1]â =â (1.7)(1.69)â ââ (0.6)(1.7)â =â 1.853 â h[3]â =â 1.7h[2]â ââ 0.6h[1]â +â 1.7Îī[3]â ââ 1.2Îī[2]â =â (1.7)(1.853)â ââ (0.6)(1.69)â =â 2.1361 â h[4]â =â 1.7h[3]â ââ 0.6h[2]â +â 1.7Îī[4]â ââ 1.2Îī[3]â =â (1.7)(2.1361)â ââ (0.6)(1.8563)â =â 2.5195
-
Si h[n]â
=â
(0.5nâ
+â
1â
+â
1.2nâ
+â
1)u[n] con x[n]â
=â
u[n]y[n]â =â x[n]*h[n]â =â ââkâ =â â ââ âx[k]h[nâ ââ k] â y[n]â =â h[n]*x[n]â =â ââkâ =â â ââ âh[k]x[nâ ââ k] â y[n]â =â h[n]*x[n]â =â ââkâ =â â ââ â0.5kâ +â 1â +â 1.2kâ +â 1)u[k]u[nâ ââ k] â y[n]â =â ââkâ =â â ââ â0.5kâ +â 1u[k]u[nâ ââ k]â +â ââkâ =â â ââ â1.2kâ +â 1u[k]u[nâ ââ k] â y[n]â =â ânkâ =â 00.5kâ +â 1â +â ânkâ =â 01.2kâ +â 1â =â ânkâ =â 00.5k(0.5)â +â ânkâ =â 01.2k(1.2)â =â 0.5ânkâ =â 00.5kâ +â 1.2ânkâ =â 01.2k â Con âNnâ =â 0Îąnâ =â (1â ââ ÎąNâ +â 1)/(1â ââ Îą) â y[n]â =â 0.5ââ(1â ââ 0.5nâ +â 1)/(1â ââ 0.5)ââ u[n]â +â 1.2ââ(1â ââ 1.2nâ +â 1)/(1â ââ 1.2)ââ u[n] â y[n]â =â (1â ââ 0.5nâ +â 1)u[n]â ââ 6(1â ââ 1.2nâ +â 1)u[n] â y[n]â =â (1â ââ 0.5nâ +â 1â ââ 6â +â (6)(1.2nâ +â 1))u[n] â y[n]â =â (â ââ 0.5nâ +â 1â +â (6)(1.2nâ +â 1)â ââ 5)u[n]

Sistemas lineales e invariantes en el tiempo en TD nivel avanzado:
- Obtenga H(z) y diga si es o no estable el sistema.
- Determine el diagrama de bloques del sistema.
- Obtenga los primeros 5 valores de h[n] mediante recursividad.
- Obtenga la respuesta al escalÃģn mediante convoluciÃģn.
SoluciÃģn
-
Partiendo de la funciÃģn discreta h[n]â
=â
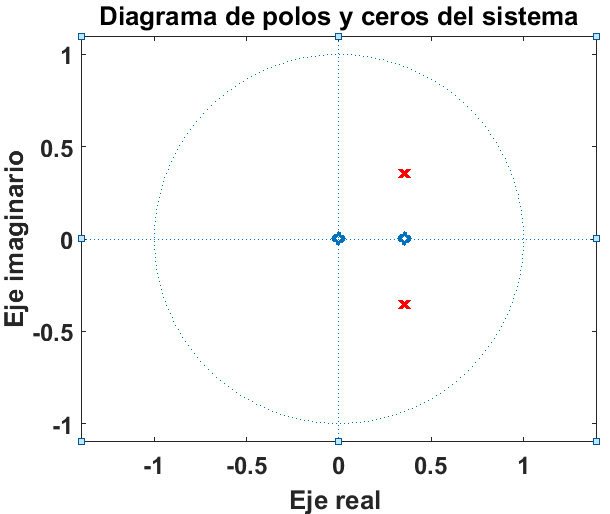
ââ0.5ncosââ(Ïn)/(4)ââ ââ u[n]H(z)â =â (z2â ââ 0.5zcosââ(Ï)/(4)ââ )/(z2â ââ 2(0.5)zcosââ(Ï)/(4)ââ â +â 0.52) â H(z)â =â (z2â ââ (â(2))/(4)z)/(z2â ââ (â(2))/(2)zâ +â 0.25) â De donde: â z1â =â (â(2))/(4)â +â (â(2))/(4)j â z2â =â (â(2))/(4)â ââ (â(2))/(4)jLas raÃces son menores a uno, lo que nos indica que se encuentran dentro del cÃrculo unitario por lo que el sistema es estable.
% Ejercicio 5 a=[1 -sqrt(2)/2 0.25]; b=[1 -sqrt(2)/4 0]; zplane(b,a); ylabel(âEje imaginarioâ); xlabel(âEje real â); title(âDiagrama de polos y ceros del sistemaâ);
-
Diagrama de bloques H(z)â
=â
(z2â
ââ
(â(2))/(4)z)/(z2â
ââ
(â(2))/(2)zâ
+â
0.25)âđH(z)â
=â
(1â
ââ
(â(2))/(4)zâ
ââ
1)/(1â
ââ
(â(2))/(2)zâ
ââ
1â
+â
0.25zâ
ââ
2)
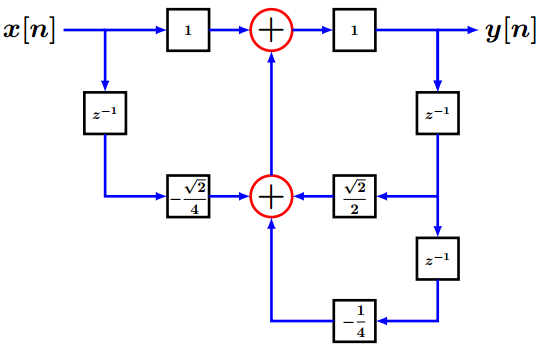 Figure 1.10âDiagrama de bloques.
Figure 1.10âDiagrama de bloques. -
Mediante recursividady[n]â ââ (â(2))/(2)y[nâ ââ 1]â +â (1)/(4)y[nâ ââ 2]â =â x[n]â ââ (â(2))/(4)x[nâ ââ 1] â y[n]â =â (â(2))/(2)y[nâ ââ 1]â ââ (1)/(4)y[nâ ââ 2]â +â x[n]â ââ (â(2))/(4)x[nâ ââ 1] â Si x[n]â =â Îī[n] entonces y[n]â =â h[n] â Evaluando en diferentes instantes â h[0]â =â (â(2))/(2)h[0â ââ 1]â ââ (1)/(4)h[0â ââ 2]â +â Îī[0]â ââ (â(2))/(4)Îī[0â ââ 1]â =â 1 â h[1]â =â (â(2))/(2)h[0]â ââ (1)/(4)h[â ââ 1]â +â Îī[1]â ââ (â(2))/(4)Îī[0]â =â 0.3536 â h[2]â =â (â(2))/(2)h[1]â ââ (1)/(4)h[0]â +â Îī[2]â ââ (â(2))/(4)Îī[1]â =â 0 â h[3]â =â (â(2))/(2)h[2]â ââ (1)/(4)h[1]â +â Îī[3]â ââ (â(2))/(4)Îī[2]â =â â ââ 0.0884 â h[4]â =â (â(2))/(2)h[3]â ââ (1)/(4)h[2]â +â Îī[4]â ââ (â(2))/(4)Îī[3]â =â â ââ 0.0625 â h[5]â =â (â(2))/(2)h[4]â ââ (1)/(4)h[3]â +â Îī[5]â ââ (â(2))/(4)Îī[4]â =â â ââ 0.0221 â h[6]â =â (â(2))/(2)h[5]â ââ (1)/(4)h[4]â +â Îī[6]â ââ (â(2))/(4)Îī[5]â =â 0
-
Respuesta al escalÃģn mediante convoluciÃģny[n]â =â h[n]âx[n] â x[n]â =â u[n] â y[n]â =â ââ0.5ncosââ(Ïn)/(4)ââ ââ u[n] â y[n]â =â âââ ââ âââ0.5kcosââ(Ïk)/(4)ââ u[k]u[nâ ââ k]ââ â u[nâ ââ k]â =â â§âĻâĐ 1 kâ âĪâ n â â 0 kâ >â n u[nâ ââ k]â =â â§âĻâĐ 1 kâ âĨâ 0 â â 0 kâ <â 0 â y[n]â =â ânkâ =â 00.5kcosââ(Ïk)/(4)ââ  â pero cosââ(Ïk)/(4)ââ â =â (1)/(2)e(jÏk)/(4)â +â (1)/(2)eâ ââ (jÏk)/(4) â âīy[n]â =â ânkâ =â 0(0.5)kââ(1)/(2)e(jÏk)/(4)â +â (1)/(2)eâ ââ (jÏk)/(4)ââ
y[n]â =â ânkâ =â 0ââ(1)/(2)ââ ââ(1)/(2)e(jÏ)/(4)ââ kâ +â ânkâ =â 0ââ(1)/(2)ââ ââ(1)/(2)eâ ââ (jÏ)/(4)ââ k â y[n]â =â ââ(1)/(2)ââ ânkâ =â 0ââ(1)/(2)e(jÏ)/(4)ââ kâ +â ââ(1)/(2)ââ ânkâ =â 0ââ(1)/(2)eâ ââ (jÏ)/(4)ââ k â y[n]â =â ââ(1)/(2)ââ âĄâĒâĒâĢ(1â ââ ââ(1)/(2)e(jÏ)/(4)ââ nâ +â 1)/(1â ââ ââ(1)/(2)e(jÏ)/(4)ââ )â +â (1â ââ ââ(1)/(2)eâ ââ (jÏ)/(4)ââ nâ +â 1)/(1â ââ ââ(1)/(2)eâ ââ (jÏ)/(4)ââ )âĪâĨâĨâĶu[n]
- Obtenga H(z), el diagrama de polos y ceros y decir si es o no estable el sistema.
- Determine el diagrama de bloques.
- Obtenga los primeros 5 valores de h[n] mediante recursividad.
SoluciÃģn
-
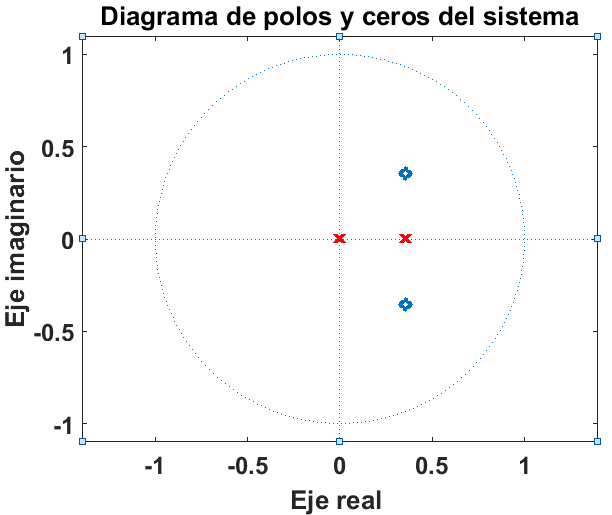
H(z)â =â Îąncos(Ïn)âš(1â ââ Îącos(Ï)zâ ââ 1)/(1â ââ 2Îącos(Ï)zâ ââ 1â +â Îą2zâ ââ 2)H(z)â =â (1â ââ 0.5cosââ(Ï)/(4)ââ zâ ââ 1)/(1â ââ cosââ(Ï)/(4)ââ zâ ââ 1â +â 0.25zâ ââ 2) â H(z)â =â (1â ââ (â(2))/(4)zâ ââ 1)/(1â ââ (â(2))/(2)zâ ââ 1â +â (1)/(4)zâ ââ 2) â H(z)â =â (4â ââ â(2)zâ ââ 1)/(4â ââ 2â(2)zâ ââ 1â +â zâ ââ 2) â AsÃ, H(z)â =â (4z2â ââ â(2)z)/(4z2â ââ 2â(2)zâ +â 1)Se puede conocer entonces los polos y ceros4z2â ââ 2â(2)â +â 1â ââ z1â =â ((1)/(2)â ââ (i)/(2))/(â(2)),â  z2â =â ((1)/(2)â +â (i)/(2))/(â(2)).Ceros: c1â =â 0,â  c2â =â (1)/(2â(2)).Se puede notar de la grÃĄfica que, al caer todos los puntos dentro del cÃrculo unitario, el sistema es estable.
% Ejercicio 6 a=[1 -sqrt(2)/4 0]; b=[1 -sqrt(2)/2 1/4]; zplane(b,a); ylabel(âEje imaginarioâ); xlabel(âEje real â); title(âDiagrama de polos y ceros del sistemaâ);
-
Diagrama de bloques del sistema.X(z)(â ââ â(2)zâ +â 4z2)â +â Y(z)(â ââ 4z2â +â 2â(2)z)â =â Y(z) â X(z)(â ââ â(2)zâ +â 4z2)â +â â ââ 4z2Y(z)â +â 2â(2)zY(z)â =â Y(z) â X(z)(â ââ â(2)zâ +â 4z2)â =â Y(z)â +â 4z2Y(z)â ââ 2â(2)zY(z) â X(z)(â ââ â(2)zâ +â 4z2)â =â Y(z)(4z2â ââ 2â(2)zâ +â 1) â H(z)â =â (Y(z))/(X(z))â =â (4z2â ââ â(2)z)/(4z2â ââ 2â(2)zâ +â 1) â H(z)â =â (z2â ââ (â(2))/(4)z)/(z2â ââ (â(2))/(2)â +â (1)/(4))
-
Por recursividad.y[n]â ââ (â(2))/(2)y[nâ ââ 1]â +â y[nâ ââ 2]â =â 4x[n]â ââ â(2)x[nâ ââ 1] â Si x[n]â =â Îī[n] â h[0]â =â (â(2))/(2)h[â ââ 1]â ââ h[â ââ 2]â +â 4Îī[0]â ââ â(2)Îī[â ââ 1]â =â 4 â h[1]â =â (â(2))/(2)h[0]â ââ h[â ââ 1]â +â 4Îī[1]â ââ â(2)Îī[0]â =â â(2) â h[2]â =â (â(2))/(2)h[1]â ââ h[0]â +â 4Îī[2]â ââ â(2)Îī[1]â =â â ââ 3 â h[3]â =â (â(2))/(2)h[2]â ââ h[1]â +â 4Îī[3]â ââ â(2)Îī[2]â =â â ââ (5â(2))/(2)
Análisis de Fourier de TC:
En los ejemplos con soluciÃģn de esta secciÃģn se abordan conceptos como la representaciÃģn de seÃąales en serie de Fourier, comportamiento y respuesta de sistemas en el dominio de la frecuencia, correspondiente a la transformada de Fourier, asà como su representaciÃģn grÃĄfica.
Selecciona la dificultad en las caritas de la izquierda.
Análisis de Fourier de TC nivel principiante:
-
Considere la respuesta al impulso de un sistema comoSi la entrada es una exponencial compleja con Ï0â =â 2Determine el valor propio del sistema a la frecuencia de la seÃąal de entrada.SoluciÃģnUna forma de determinar el valor propio es a partir de la respuesta al impulso, h(t), para obtener funciÃģn de transferencia evaluada a la frecuencia de la seÃąal de entrada, es decir, que se puede obtener la funciÃģn del sistema mediante la tÃĐcnica de Laplace unilateral y evaluarla a la frecuencia deseada. Esto esen donde
-
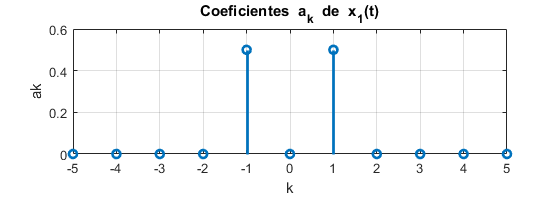
Exprese la seÃąal x(t), con frecuencia fundamental Ï1, en forma exponencial,
como en la Ec. 5.1, y determine sus coeficientes ak.
c) â Verifique con Matlab los resultados y grafique para cada seÃąal el diagrama espectral de los coeficientes ak vs k.
SoluciÃģn
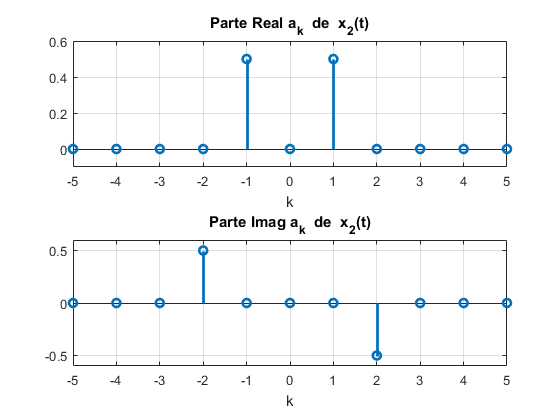
a) La seÃąal x1(t) se puede expresar en tÃĐrminos de exponenciales complejas quedando en la forma de la Ec. 5.1 comoya que la frecuencia fundamental es Ï1, entonces y los coeficientes ak de las exponenciales se obtienen de manera directa comob) La seÃąal x2(t) en este caso queda en tÃĐrminos de exponenciales complejas comoya que la frecuencia fundamental de x2(t) es Ï1, los coeficientes ak sonyc) En la figura inferior (5.1) se muestra la grÃĄfica de los coeficientes de la seÃąal x1(t), se observa que estÃĄn presentes en que corresponden al coseno. En la figura (5.2) se muestra la grÃĄfica de los coeficientes de la seÃąal x2(t), se observa que la parte real a corresponde a un coseno a la frecuencia Ï0, mientras que la parte imaginaria corresponde a un seno a la frecuencia 2Ï0.
El cÃģdigo para obtener los coeficientes y la grÃĄfica de x2(t) es%senal x2(t) wo=2*pi; T=1; t=0:0.001:T-0.001; x=cos(wo*t)+ sin(2*wo*t); %Grafica del espectro de x(t) ak=(1/length(t))*fft(x); %calculo de los coeficientes ak ak1=fftshift(ak); %calculo de los coeficientes ak con k=0 centrada k2=(length(ak1)/2)+1; k1=-5:5; d=5; â subplot(211),stem(k1,real(ak1(k2-d:k2+d)), âLineWidthâ,2); grid;title(âParte Real{ a}_{k } de {{ x}_{2}(t)}â);xlabel(âkâ);%ylabel(âakâ);% coeficientes ak axis([-5 5 -.1 .6]) â subplot(212), stem(k1,imag(ak1(k2-d:k2+d)), âLineWidthâ,2); grid;xlabel(âkâ);title(âParte Imag{ a}_{k } de {{ x}_{2}(t)}â);% angulos de ak axis([-5 5 -.6 .6])
Análisis de Fourier de TC nivel intermedio:
-
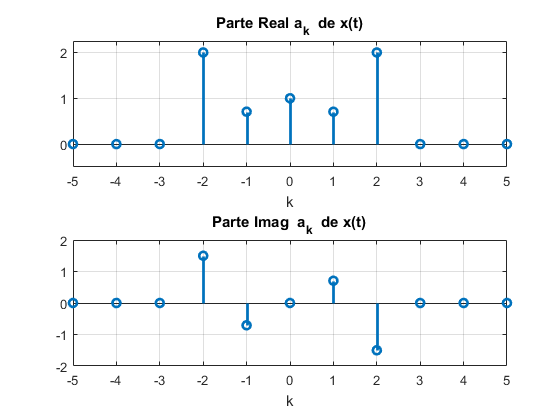
Exprese la seÃąal x(t) en tÃĐrminos de exponenciales complejas, considerando que Ï2â
=â
2Ï1 y determine los coeficientes ak de la serie exponencial,
la Ec. 5.1 y grafique la parte real y la parte imaginaria.SoluciÃģnx(t) se puede expresar en forma exponencial comoEn este caso los coeficientes de las exponenciales sonObserve que el subÃndice k de los coeficientes corresponde al mÚltiplo de la frecuencia fundamental. La figura (5.3) muestra la grÃĄfica de los coeficientes.
-
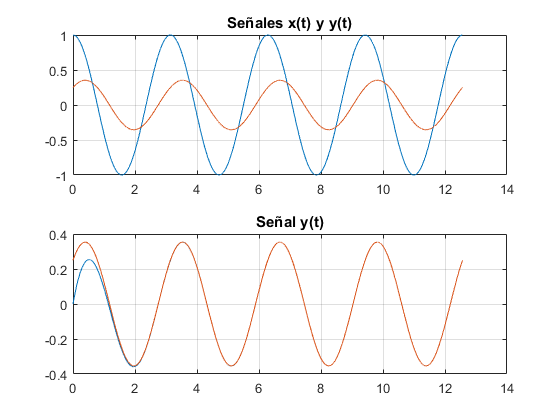
Considerando el ejemplo 1 en donde la respuesta al impulso corresponde a un sistema de primer orden, cuyo modelo, que relaciona la entrada con la salida esDetermine la respuesta del sistema a la entrada en dondeSoluciÃģnDe acuerdo con la caracterÃstica de las funciones propias, la respuesta se obtiene de la Ec. 5.4, en la cual se requiere determinar el valor propio que se interpreta como la funciÃģn del sistema evaluada a la frecuencia de la seÃąal de entrada jÏ0.Del ejemplo 1, se obtuvoLa respuesta permanente y(t) con kâ =â 1, a1â =â 1, ya que sÃģlo se tiene una exponencial, por lo queComo se observa en la resuesta y(t), Ec. 5.5, si una seÃąal periÃģdica se expresa en tÃĐrminos de exponenciales complejas, la respuesta del sistema sigue siendo la misma seÃąal de entrada alterada en su magnitud y fase por el valor propio .
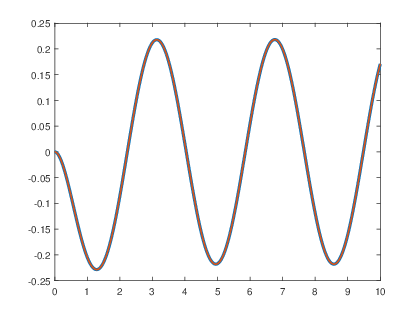
En la figura 5.4 se presenta en la grÃĄfica superior las seÃąales traslapadas de entrada x(t) y de salida y(t), en donde la salida estÃĄ atenuada en un factor de y con un atraso de â ââ Ïâ ââ 4. La grÃĄfica inferior corresponde a la salida y(t) de la Ec. 5.5, junto con la obtenida con Matlab con la funciÃģn lsim() para su verificaciÃģn, la cual muestra la parte transitoria.
Análisis de Fourier de TC nivel avanzado:
-
Se considera ahora el sistema de segundo orden dado porSi la entrada x(t) es del tipo sinusoidal, determine la respuesta del sistema a esta entrada.SoluciÃģn
Los coeficientes espectrales se obtienen al expresar x(t) en forma exponencial, resultandoEl valor propio se obtiene con la funciÃģn de transferencia de la Ec. 5.6que al sustituir sâ =â jÏ se obtiene la funciÃģn del sistema en el dominio de la frecuencia, llamada Respuesta en Frecuencia.A partir de la cual se calcula el valor propio considerando la frecuencia de la seÃąal de entrada Ï0â =â 1 y con kâ =â â ââ 1 y kâ =â 1De manera que la respuesta permanente y(t) esObteniendo finalmenteObserve que la respuesta y(t) se puede obtener de manera directa multiplicando y sumando la magnitud y el ÃĄngulo, respectivamente, del valor propio con la entrada del sistema.
Análisis de Fourier en TD:
En los ejemplos con soluciÃģn de esta secciÃģn se abordan conceptos como la representaciÃģn de seÃąales en serie de Fourier, comportamiento y respuesta de sistemas en el dominio de la frecuencia, correspondiente a la transformada de Fourier, asà como su representaciÃģn grÃĄfica.
Selecciona la dificultad en las caritas de la izquierda.
Análisis de Fourier en TD: nivel principiante:
Sistema de IdentificaciÃģn de frecuencias de la seÃąal x[n].
En esta actividad se identifican las frecuencias que componen una seÃąal x[n]. ReafirmarÃĄ los conceptos de Serie de Fourier, funciÃģn de transferencia, transformada de Fourier, respuesta en frecuencia, filtro en TD.
El diagrama de bloques del sistema de detecciÃģn de frecuencia se muestra en la Figura 6.3.
- Analice cuidadosamente el digrama de bloques para comprender la funcionalidad.

Análisis de Fourier en TD: nivel intermedio:
El programa descrito en el ejercicio anterior se compone de tres partes:
- GeneraciÃģn de seÃąal
- IdentificaciÃģn de la primera frecuencia
- IdentificaciÃģn de la segunda frecuencia
- Transcriba y ejecute el programa.
- Analice el programa e identifique la funcionalidad de acuerdo con el digrama de bloques de la Figura 6.3.
n=0:7; %Periodo de la seÃąal de seÃąal de 2 frecuencias x1=cos(pi*n/4)+cos(3*pi*n/4); %seÃąal de 2 frecuencias yf1=1./(length(n))*fft(x1); %Espectro de seÃąal de 2 frecuencias k=n; stem(k,yf1(k+1)) %Grafica de Espectro de seÃąal de 2 frecuencias â %Identifica 1a frecuencia [b,a]=butter(2,3/8); %selecciÃģn de filtro [H,w]=freqz(b,a); % Respuesta en frecuencia del filtro hold on plot(w,abs(H)); grid % Grafica de Respuesta en frecuencia del filtro yf11=filter(b,a,x1); % Respuesta a la salida del filtro yf12=(1./length(n))*fft(yf11); % Espectro de la seÃąal filtrada figure stem(k,abs(yf1(k+1))) % Espectro de la seÃąal x[n] â [m1 i1]=max(abs(yf12)) % Valor mÃĄximo del espectro de seÃąal filtrada disp(âla frecuencia 1 es 2pi por:â) frecuencia=(pi./length(n))*(i1-1); %IdentificaciÃģn de frecuencia rats((1./length(n)).*(i1-1)) â %Identifica 2a frecuencia Se repite para una segunda frecuencia [b1,a1]=butter(2,5/8,âhighâ); [H1,w]=freqz(b1,a1); hold on plot(w,abs(H1)); grid yf21=filter(b1,a1,x1); yf22=(1./length(n))*fft(yf21); â [m2 i2]=max(abs(yf22)) disp(âla frecuencia 2 es 2pi por:â) frecuencia=(pi./length(n))*(i1-1); rats((1./length(n)).*(i1-1))
Análisis de Fourier en TD: nivel avanzado:
Con base en el programa y Figuras generadas responda las siguientes preguntas.
- ÂŋQue representa la seÃąal de TD de la Figura 1?
- ÂŋQue representa la seÃąal de TC de la Figura 1 y de la Figura 2?
- Reconstruya la seÃąal x[n] y grafÃquela.
- ÂŋEn que intervalo de frecuencias se encuentran las seÃąales de TD?
- ÂŋQue es un filtro?
- ÂŋQue tipo de filtros se estÃĄn utilizando?
- ÂŋCual es la frecuencia de corte de la Figura 1 y de la Figura 2?
- Proponga una nueva frecuencia de corte para la seÃąal de la Figura 2, de manera que no permita el paso de la primera armÃģnica.
-
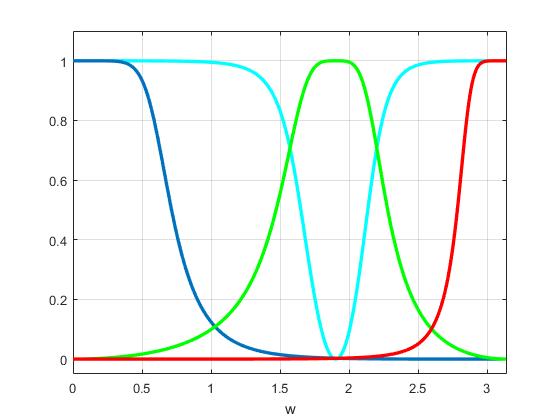
La Figura 6.4 incluye la respuesta en frecuencia de cuatro tipos de filtros.
- ÂŋComo se identifican y nombran a cada uno?
- ÂŋCual es la frecuencia de corte de cada uno, aproximadamente?