



- Sistemas TC y TD
- SeûÝales TC y TD
- SLIT TC
- SLIT TD
- Fourier TC
- Fourier TD
Selecciona un tema de arriba.
Primero selecciona un tema de arriba.
Señales en TC y en TD:
En esta secciû°n de SeûÝales TC y TD se presentan aplicaciones en las que el estudiante se familiariza con seûÝales prûÀcticas, de manera especûÙfica con seûÝales de audio generadas de diversos dispositivos, las asocia e identifica de forma aproximada a modelos matemûÀticos.
Selecciona la dificultad en las caritas de la izquierda.
Señales en TC y en TD nivel principiante:
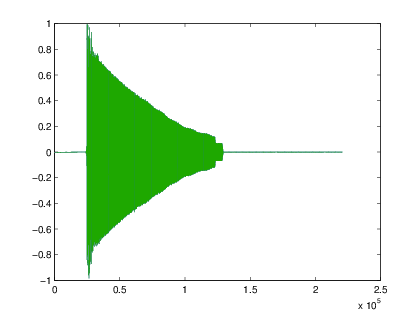
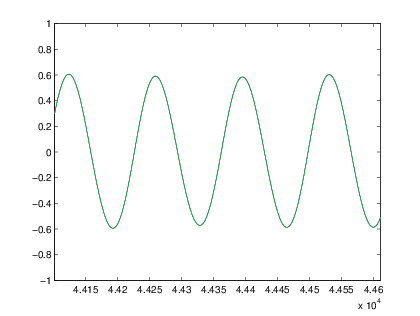
- "Guitarra.wav"
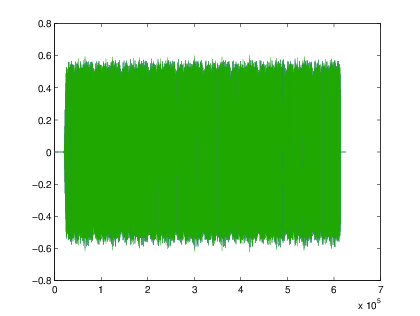
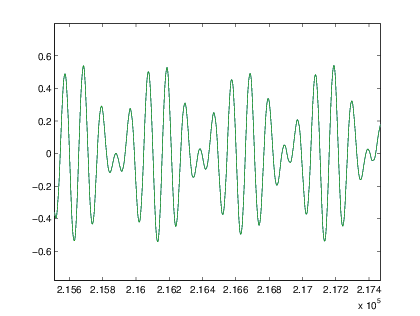
- "descolgado.wav"
1)
% sonido.m ãGuitarra.wavã,ãdescolgado.wavã
[y,fs]=wavread(ãGuitarra.wavã);
sound(y,fs);
plot(y)
%sonido.m ãGuitarra.wavã,ãdescolgado.wavã
[y,fs]=wavread(ãdescolgado.wavã);
sound(y,fs);
plot(y)
Se identifica que son dos seûÝales cotidianas, la nota de una guitarra y el sonido de descolgado del telûˋfono; ademûÀs se observa que la seûÝal de ãGuitarra.wavã es una seûÝal senoidal cuya amplitud decae exponencialmente, mientras que ãdescolgado.wavã corresponde a la multiplicaciû°n de dos senoidales, una de baja frecuencia y otra de alta frecuencia. AdemûÀs, se identifica que estos dos sonidos reales pueden representarse, de forma muy aproximada, mediante funciones matemûÀticas, senos y cosenos.
Señales en TC y en TD nivel intermedio:
-
Grabe las seûÝales de audio que se enlistan. La funciû°n wavread permite leer un archivo de sonido tipo ã*.wavã (Read Microsoft Wave). Utilice dicha funciû°n para leer archivos de sonido indicados. Con la funciû°n sound se podrûÀ reproducir el sonido. AdemûÀs, grafique la seûÝal de sonido, y con la herramienta de amplificar (Zoom in ) observe e identifique el tipo de seûÝal.
- Un silbido sostenido lo mûÀs posible.
- El tintineo de una campana.
- El sonido de un diapasû°n.
- La nota de algû¤n instrumento musical: piano, flauta, etc.
- El sonido de un martillo neumûÀtico.
- El golpe de un bat a una pelota.
Señales en TC y en TD nivel avanzado:
- Investigue el valor de la divisa del dolar americano, a la venta, en los û¤ltimos 30 dûÙas. Con los datos obtenidos, grafique la seûÝal e identifique si la seûÝal es de tiempo continuo o discreto, determinûÙstica o aleatoria, periû°dica o aperiû°dica, de energûÙa o de potencia. Considere que los dûÙas en que no haya movimiento econû°mico, el valor de la divisa serûÀ el del dûÙa anterior.
Sistemas LIT en TC y en TD:
En esta secciû°n de Sistemas TC y TD se presentan actividades que permiten a los estudiantes ejercitarse intensamente sobre los temas, se generan aplicaciones que tengan sentido para ellos y que les son û¤tiles a lo largo de su carrera.
Selecciona la dificultad en las caritas de la izquierda.
Sistemas LIT en TC y en TD nivel principiante:

Sistemas LIT en TC y en TD nivel intermedio:
Sistemas LIT en TC y en TD nivel avanzado:
Ventaja de la linealidad en los sistemas:
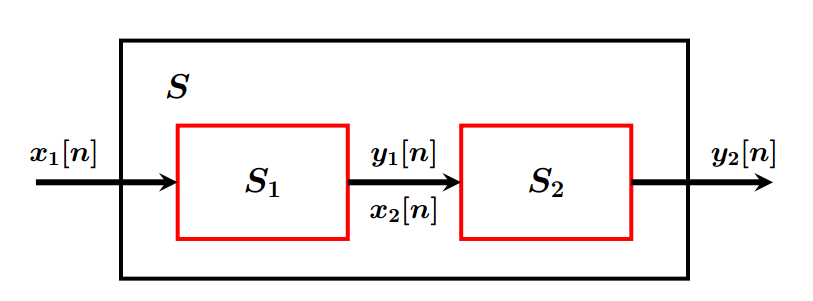
Hay ciertos sistemas lineales, para los cuales, es posible reducir el costo de ejecuciû°n al utilizar la linealidad del sistema. De esta forma, si en dicho sistema se deben sumar varias seûÝales de salida, vale la pena investigar si es posible eficientar el proceso al sumar primero las seûÝales de entrada. El siguiente ejercicio ilustra esta situaciû°n.
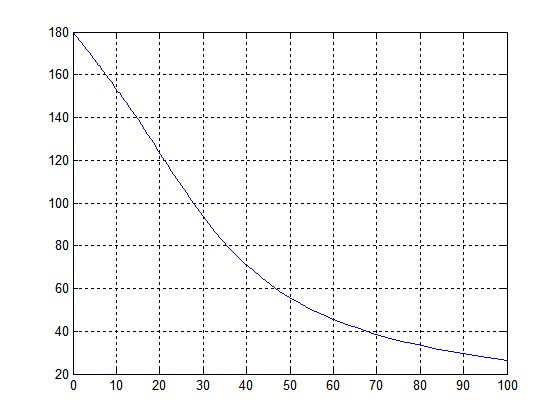
Suponga que se tiene una base de datos de la temperatura promedio de cada dûÙa, de cierta localidad, por los û¤ltimos 100 aûÝos. De esta forma, se desea obtener el promedio, durante esos 100 aûÝos, de la temperatura de cada dûÙa del aûÝo. Dicho proceso es sencillo; sin embargo, al consultar la base de datos, se observa que existen algunos dûÙas en donde la tempera es considerablemente distinta respecto a las temperaturas de los dûÙas cercanos a estos; por ejemplo: la temperatura del 21 de mayo de 1983 fue de 7ô¯C, mientras que en los dûÙas 19, 20, 22 y 23 de mayo de ese mismo aûÝo, las temperaturas fueron de 16ô¯, 14ô¯, 14.5ô¯ y 15ô¯ respectivamente; por lo cual, se desea suavizar la base de datos promediando la temperatura de cada dûÙa con respecto a las temperaturas registradas 2 dûÙas antes y dos dûÙas despuûˋs (sistema promedio mû°vil).
Una manera de hacer el proceso es aplicar el sistema promedio mû°vil a cada una de las seûÝales que representa la temperatura de cada dûÙa del aûÝo y, posteriormente, promediar las seûÝales de salida; se puede observar que en este enfoque el sistema promedio mû°vil tendrûÙa que ejecutarse para 100 seûÝales distintas (una por cada aûÝo).
Una forma alterna de abordar el problema, es haciendo uso de la linealidad del sistema promedio mû°vil, lo que implicarûÙa primero promediar las seûÝales de temperatura de los 100 aûÝos y, posteriormente, introducir al sistema la suma de estas seûÝales. En este caso sû°lo se tendrûÙa que ejecutar en una ocasiû°n al sistema promedio mû°vil.
Para verificar que el sistema se ejecuta mûÀs rûÀpido en la segunda metodologûÙa, realice dos programas en Matlab que reproduzcan el sistema descrito anteriormente con cada una de las metodologûÙas propuestas.
Notas:
- Para medir el tiempo de ejecuciû°n, puede utilizar el par de funciones de Matlab, tic y toc.
- Observe que el sistema se indetermina para los valores de nã =ã 1,ã 2,ã 364 y 365, ya que requerirûÙa de x[ã ãã 1], x[0], x[366] y x[367]. De esta forma, suponga que y[1]ã =ã 0, y[2]ã =ã 0, y[364]ã =ã 0 y y[365].
-
Para obtener la base de datos de la temperatura diaria por un lapso de 100 aûÝos, genere una pseudo base de datos con ayuda de la funciû°n de Matlab randi; que genera una matriz A de tamaûÝo NxM de nû¤meros enteros pseudoãaleatorios en un dominio de [numMin,numMax]. Para el ejercicio Mã
=ã
365, Nã
=ã
100, y se propuso que la temperatura mûÙnima de la base de datos (numMin) es de 13ô¯, mientras que, la temperatura mûÀxima (numMax) es de 38ô¯; esto es:Por û¤ltimo, no se considera que existan aûÝos bisiestos en la base de datos.
A=randi([13,38],365,100)
Programa para realizar el proceso segû¤n la primera metodologûÙa:
Cû°digo en matlab:
A=randi([13,38],365,100);
ã
% --> y_is Es una matriz que por columna registra el promedio mû°vil de las
%temperaturas diarias por un aûÝo
ã
%--------------------------------------------%
%reservar memoria para y_is:
y_is = zeros(size(A));
ã
%--------------------------------------------%
%inicializar el reloj para saber cuûÀnto dura el proceso
tic
ã
%--------------------------------------------%
%Sistema promedio mû°vil
for c1=1:1:100 %---> recorre aûÝo por aûÝo
for c2=3:1:363 %---> recorre dûÙa por dûÙa
y_is(c2,c1)=1/5*( A(c2-2,c1)+A(c2-1,c1)+A(c2,c1)+...
A(c2+1,c1)+A(c2+2,c1) );
end
end
ã
%--------------------------------------------%
%Obtener la salida final del sistema, y[n], como el promedio de las
%temperaturas diarias
y=(1/N)*sum(y_isã);
ã
%--------------------------------------------%
%detener el reloj
tiempo1=toc
ã
%--------------------------------------------%
%recortar de y[n] los elementos 1,2,364,365
y([1,2,364,365])=[];
Programa para realizar el proceso segû¤n la segunda metodologûÙa:
Cû°digo en matlab:
A=randi([13,38],365,100);
ã
%--------------------------------------------%
%reservar memoria para y_is:
y_is = zeros(size(A));
ã
%--------------------------------------------%
%inicializar el reloj para saber cuûÀnto dura el proceso
tic
ã
%--------------------------------------------%
%Promediar las temperaturas diarias a travûˋs de todos los aûÝos
% ---> x[n]
x=(1/N)*sum(Aã);
ã
%--------------------------------------------%
%ingresar la seûÝal x[n] al sistema promedio mû°vil
ã
for c2=3:1:363 %---> recorre dûÙa por dûÙa
y(c2)=1/5*( x(c2-2)+x(c2-1)+x(c2)+...
x(c2+1)+x(c2+2) );
end
ã
%--------------------------------------------%
%detener el reloj
tiempo2=toc
El tiempo de procesamiento del sistema, promedio mû°vil, aplicado de acuerdo a la primera metodologûÙa fue de 9.3639X10ã ãã 04 segundos, mientras que el tiempo de procesamiento del sistema, promedio mû°vil, aplicado de acuerdo a la segunda metodologûÙa fue de 2.1137X10ã ãã 04, esto es, el proceso en el que primero se promediû° la temperatura de la base de datos y posteriormente se aplicû° el sistema promedio mû°vil, fue 4.4 veces mûÀs rûÀpido que el proceso en el que primero se realizû° el promedio mû°vil a cada una de las 100 seûÝales y posteriormente se promediaron las seûÝales de salida.
Sistemas Lineales Invariantes en el Tiempo en TC:
En esta secciû°n de SLIT TC se presentan aplicaciones prûÀcticas para ser realizadas de forma simulada o bien en el laboratorio. Se incluyen sistemas elûˋctricos de primero y segundo orden.
Selecciona la dificultad en las caritas de la izquierda.
Sistemas Lineales Invariantes en el Tiempo en TC nivel principiante:
TeorûÙa BûÀsica
Sistema de 1er Orden
Funciû°n de Transferencia
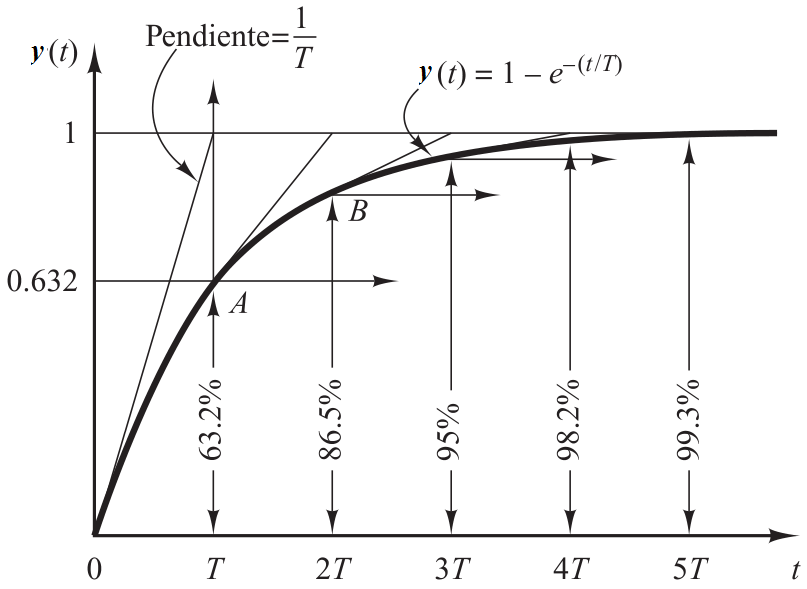
Respuesta al escalû°n
Constante de tiempo
Cuestionario Previo
- La funciû°n de transferencia
- La respuesta al impulso
- La respuesta al escalû°n
- La constante de tiempo
- La funciû°n de transferencia
- La respuesta al impulso
- La respuesta al escalû°n
- La constante de tiempo
AnûÀlisis Experimental
Experimento 1
Experimento 2
Sistemas Lineales Invariantes en el Tiempo en TC nivel intermedio:
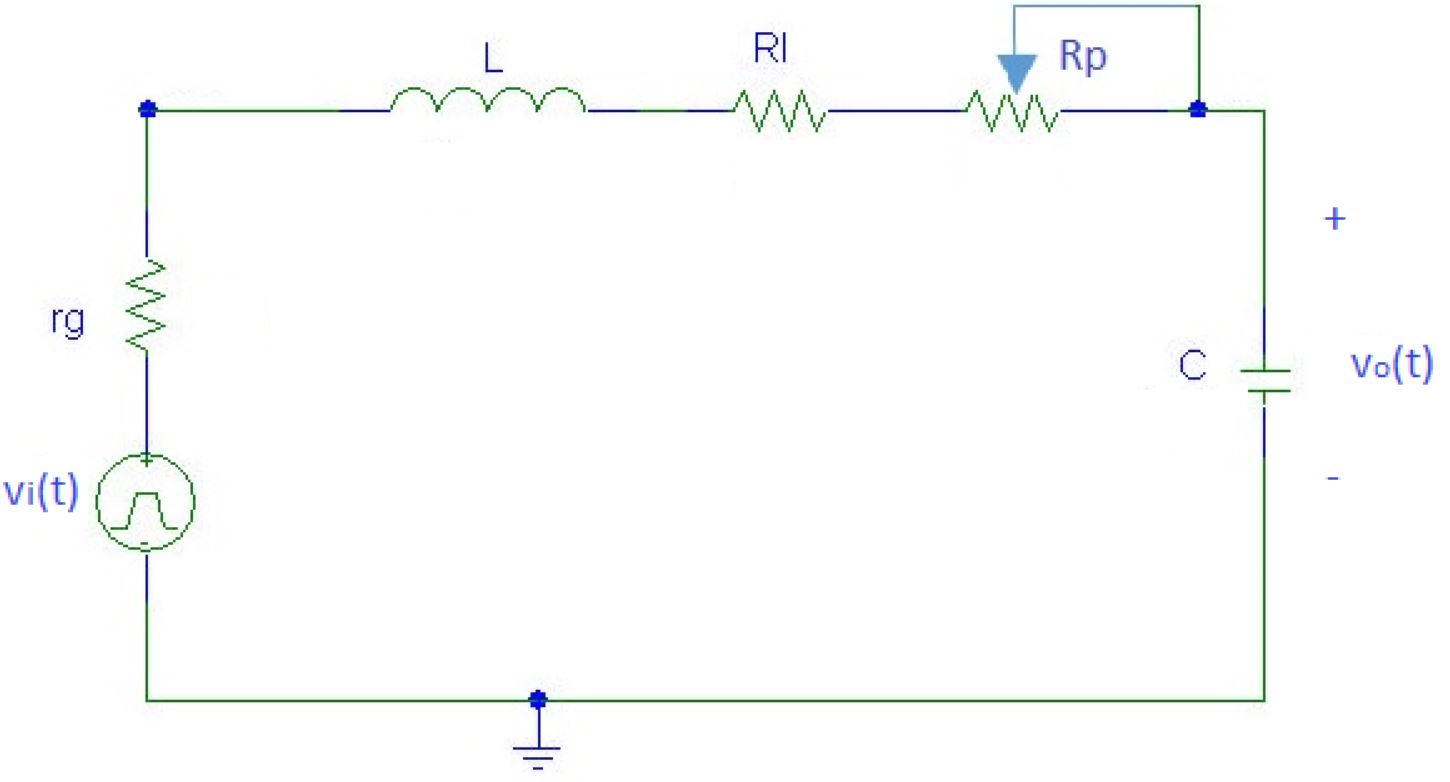
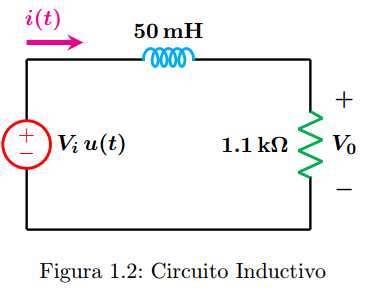
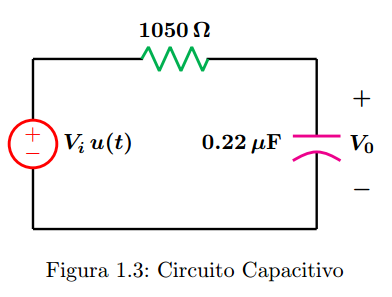
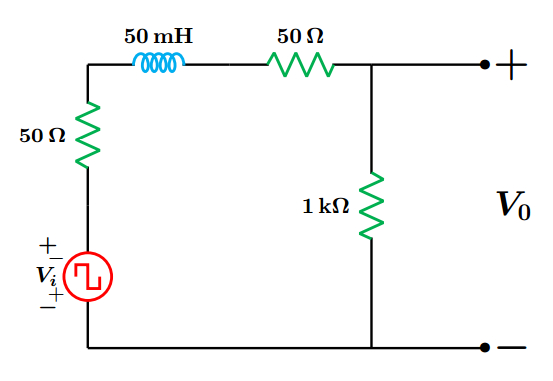
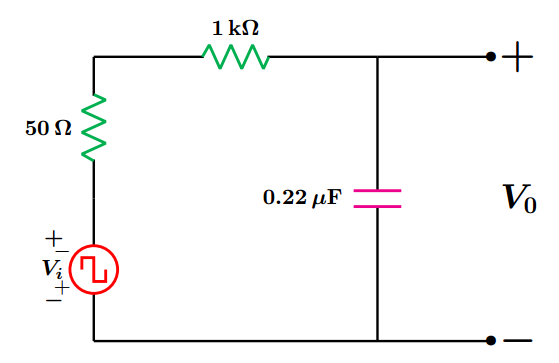
L es un inductor de 50mH
C es un capacitor de 0.22ö¥F
Reã =ã rgã +ã Rlã +ã Rp es la resistencia equivalente con los valores de 50 öˋ, 50 öˋ y 2000 öˋ, respectivamente.
- Determine la funciû°n de transferencia del sistema (FTS).
- Identifique los coeficientes de la FTS con los de la Ec. 3.7 y exprese la frecuencia natural del sistema wn y la razû°n de amortiguamiento öÑ en tûˋrminos de Re,ã L,ã C .
- Con Rpã =ã 0 determine el valor de öÑ y el de wn.
- Obtenga las raûÙces del sistema y dibuje el diagrama de polos y ceros.
- Determine y grafique la respuesta al impulso y diga que comportamiento tiene el sistema.
- Determine y grafique la respuesta al escalû°n.
- Con Rpã =ã 2000 öˋ, mûÀximo valor, determine el valor de öÑ y el de wn.
- Obtenga las raûÙces del sistema y dibuje el diagrama de polos y ceros.
- Determine y grafique la respuesta al impulso y diga que comportamiento tiene el sistema.
- Determine y grafique la respuesta al escalû°n.
- Determine el valor de Rp con el que se obtiene un comportamiento criticamente amortiguado.
- Obtenga las raûÙces del sistema y dibuje el diagrama de polos y ceros.
- Con ese valor determine y grafique la respuesta al impulso.
- Determine y grafique la respuesta al escalû°n.
Sistemas Lineales Invariantes en el Tiempo en TC nivel avanzado:
Esta actividad es un ejercicio de aplicaciû°n prûÀctica que requiere de equipo y accesorios:
- Osciloscopio
- Generador de formas de onda
- 1 potenciû°metro de 2 köˋ
- 1 capacitor cerûÀmico de 0.22ö¥F a 25 V o mayor
- 1 inductor de 50mH.
- 6 cables caimûÀn-caimûÀn
- 6 cables banana-banana
- 6 cables banana-caimûÀn
- 1 protoboard
- Genere una seûÝal cuadrada periû°dica con una frecuencia de 100Hz. esta seûÝal corresponde a una suma infinita de seûÝales escalû°n.
-
Arme el circuito de la figura y alimente con la seûÝal cuadrada.
- Conecte un canal del osciloscopio en la entrada del circuito y otro canal en la salida.
-
Coloque el cursor del potenciû°metro en el mûÀximo valor y observe en el osciloscopio la seûÝal de salida. Con base en la seûÝal observada:
- Obtenga una copia de la forma de onda experimental y compare la respuesta teû°rica con la respuesta experimental.
- Especifique como se le nombra a este comportamiento del sistema.
-
Con Rpã
=ã
0 determine:
- Obtenga una copia de la forma de onda experimental y compare la respuesta teû°rica con la respuesta experimental.
- Especifique como se le nombra a este comportamiento del sistema.
- VarûÙe el valor del potenciû°metro al valor encontrado en el punto 11 de la investigaciû°n previa, en el osciloscopio se observarûÀ, de manera aproximada, que la respuesta al escalû°n tiene un comportamiento criticamente amortiguado. Obtenga una copia de la forma de onda experimental y compare la respuesta teû°rica con la respuesta experimental.
- ô¢Se puede lograr de forma experimental observar el comportamiento oscilatorio? Justifique su respuesta.
Sistemas lineales e invariantes en el tiempo en TD:
En esta secciû°n de SLIT TD se presentan aplicaciones prûÀcticas para la generaciû°n y eliminaciû°n de ecos. Se inicia con simulaciones sencillas, se avanza con el proceso de ecos en seûÝales de audio grabadas a travûˋs de sistemas FIR, posteriormente se procesan las seûÝales a mediante sistema IIR para eliminar los ecos y obtener la seûÝal original.
Selecciona la dificultad en las caritas de la izquierda.
Sistemas lineales e invariantes en el tiempo en TD nivel principiante:
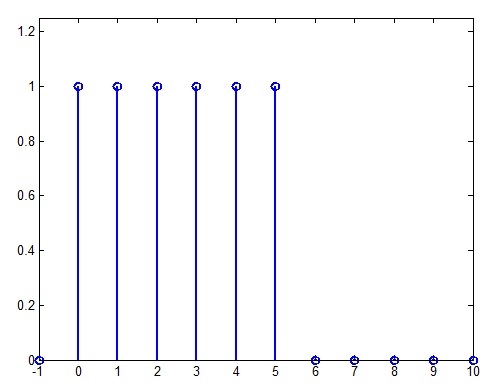
- Genere la seûÝal x[n]ã =ã u[n]ã ãã u[nã ãã 6] y grafûÙquela.
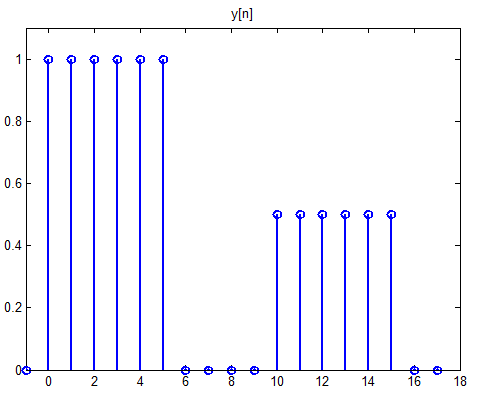
- Obtenga el modelo y la funciû°n de transferencia del sistema FIR de la ec.1.1 Considere un solo eco con öÝã =ã 0.5 y Nã =ã 10.
- Obtenga la respuesta del sistema FIR a la entrada x[n] y grafûÙquela.
- Obtenga el modelo y la funciû°n de transferencia del sistema IIR de la ec.1.2. Considere de nuevo öÝã =ã 0.5 y Nã =ã 10.
- Obtenga la respuesta del sistema IIR a la entrada y[n] y grafûÙquela.
- Verifique la generaciû°n y eliminaciû°n del eco.
-
-
La funciû°n de transferencia de H1(z) es:
-
La respuesta del sistema se obtiene multiplicando la funciû°n de tranferencia con la transformada Z de la entrada.
antitransformando Y(z) se llega aLa grûÀfica de la respuesta es
-
la funciû°n de transferencia de H2(z) es:
-
La entrada al sistema 2 es Y(z)
y la salida del sistema 2 es
De manera quela cual corresponde a la entrada.
- SeûÝal original y 3 ecos.
- Atenuaciû°n de ecos en donde kã =ã 1:3.
- Desplazamiento Nã =ã 6,ã 8,ã 10,ã 12 .
- Obtenga las expresiones de las Funciones de Transferencia del los sistemas H1(z) y H2(z).
-
Utilice la funciû°n filter para obtener la respuesta de los sistemas.
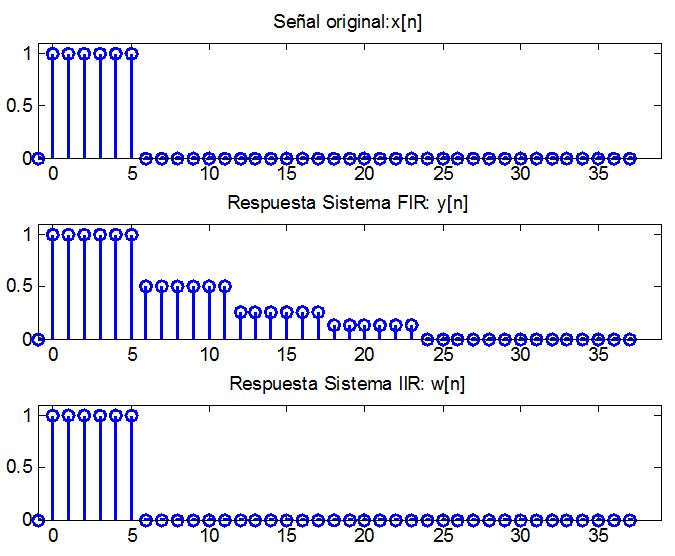
- Obtenga las grûÀficas de las seûÝales de entrada x[n], de la salida del sistema FIR y[n] y de la salida del sistema IIR w[n].
-
Con Nã
=ã
6
-
%Funciû°n escalû°n unitario function u=ud(n) u=+1.*(n>=0); ____________________________________________ % Generador y Eliminador de Ecos % Sistemas FIR-IIR en cascada % ecobase1.m GMata n=-1:37; len=length(n); N=6; %Desplazamiento x1=ud(n)-ud(n-6); %SeûÝal de entrada %Coeficientes de la FT del Sistema FIR a=1; b=[1 zeros(1,N-1) 0.5 zeros(1,N-1) 0.25 zeros(1,N-1) 0.125]; %SeûÝal salida Sistema FIR =SeûÝal de entrada Sistema IIR y1=filter(b,a,x1); ã a=[ 1 zeros(1,N-1) .5 zeros(1,N-1) 0.25 zeros(1,N-1) 0.125]; b=1; w=filter(b,a,y1); %%SeûÝal salida Sistema IIR ã subplot(311), stem(n,x1,ãLineWidthã,2);title(ãSeûÝal original:x[n]ã); axis([-1 len 0 1.1]); subplot(312),stem(n,y1,ãLineWidthã,2); title(ãRespuesta Sistema FIR: y[n]ã);axis([-1 len 0 1.1]); subplot(313),stem(n,w,ãLineWidthã,2); title(ãRespuesta Sistema IIR: w[n]ã);axis([-1 len 0 1.1]);
-
Sistemas lineales e invariantes en el tiempo en TD nivel intermedio:
Genere la seûÝal . Considere la frecuencia de la seûÝal fã =ã 261Hz, la frecuencia de muestreo Fsã =ã 4000Hz (pruebe tambien con Fsã =ã 6000Hz y Fsã =ã 8000Hz).
-
Considere 3 ecos con una atenuaciû°n de
en donde kã
=ã
1:3. Exprese la funciû°n de transferencia para este sistema.
-
Obtenga la respuesta del sistema FIR a la entrada x[n]. Utilice la funciû°n filter. Grafique la seûÝal y verifique que la respuesta incluya la seûÝal original y los tres ecos.
-
Obtenga la respuesta del sistema IIR a la entrada y[n] y grafûÙquela, de manera que se anulen los tres ecos.
Sistemas lineales e invariantes en el tiempo en TD nivel avanzado:
-
Grabe una seûÝal de audio, por ejemplo su nombre, o bien, utilice la grabaciû°n que se proporciona ãarroz.wavã.
-
Con la funciû°n wavread lea el archivo de sonido e identifique los datos de la seûÝal y la frecuencia de muestreo con la que fue grabada.
-
Realice una funciû°n en Matlab, ecos(voz,Fs,ne,Nspa) que genere los ecos y que se reproduzcan en audio, en donde los parûÀmetros de la funciû°n sean:
- voz: son los datos del archivo de sonido proporcionados con la funciû°n wavread,
- Fs: frecuencia de muestreo proporcionada con la funciû°n wavread,
- ne: nû¤mero de ecos a generar,
- Nspa: nû¤mero de espacios entre ecos.
AdemûÀs se tendrûÀ que generar un vector de ceros con la funciû°n zeros() de longitud Nspa, spa=zeros(1,Nspa), de manera que el vector y de la seûÝal a la salida del sistema FIR quede:
y=[voz spa eco1 spa eco2 spa eco3 spa ..... eco-ne ].
Utilice la funciû°n sound() para reproducir la seûÝal con ecos contenida en el vector y. Inicie con Nspa =0.
- Grafique las seûÝales de voz, y1[n] y w[n]. Utilice la funciû°n subplot(), stem ...
Serie de Fourier de TC:
En esta secciû°n de Fourier TC se aplican los conceptos en seûÝales periû°dicas de TC para realizar un anûÀlisis en el dominio de la frecuencia. Bajo este esquema se introduce el concepto de filtrado de seûÝales.
Tambiûˋn, se incluye una aplicaciû°n del anûÀlisis de Fourier de una seûÝal cardûÙaca bajo la consideraciû°n de una seûÝal periû°dica.
Selecciona la dificultad en las caritas de la izquierda.
Serie de Fourier de TC nivel principiante:
-
-
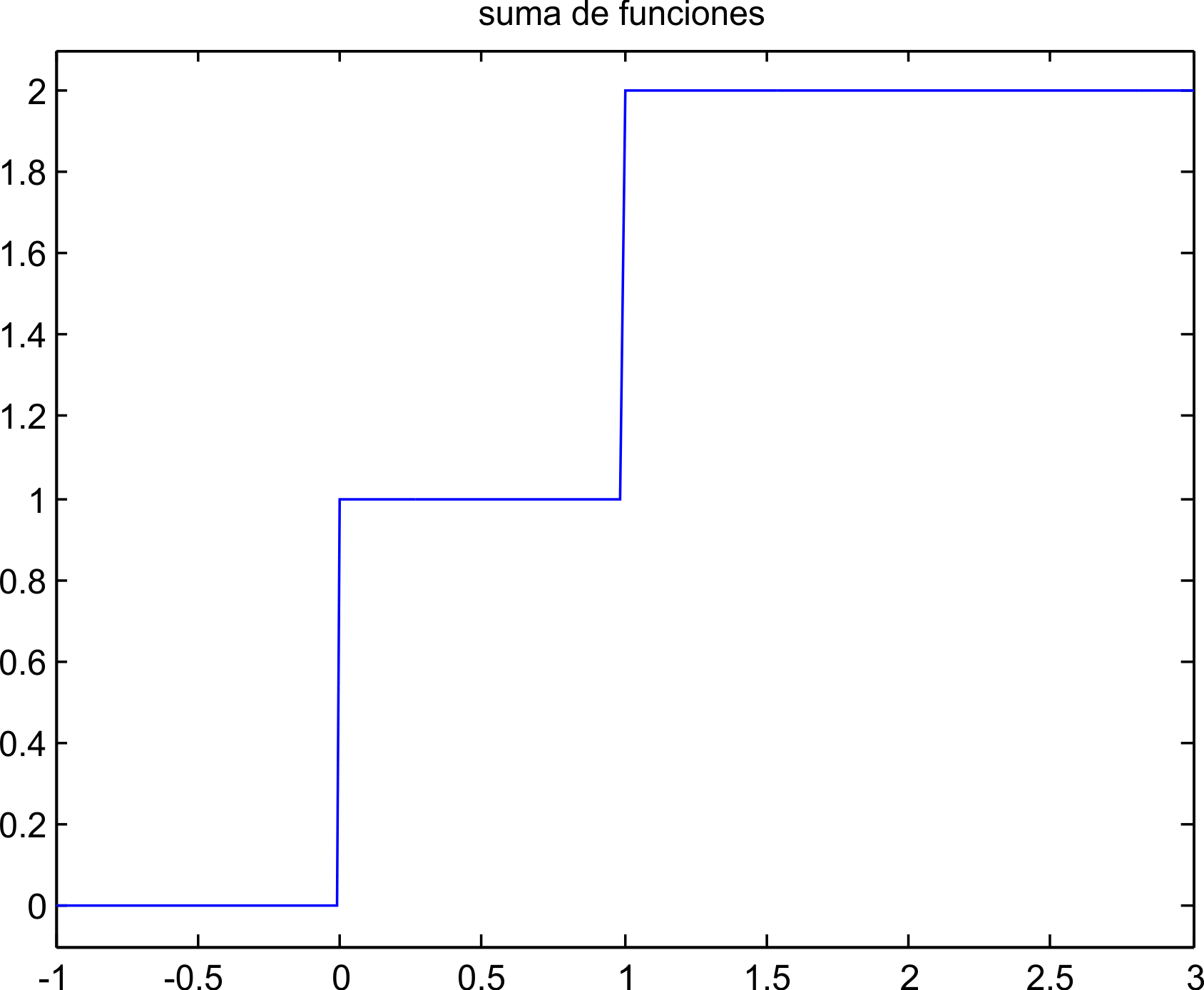
Considerando seûÝales continuas, se pueden sumar dos seûÝales escalû°n cuyo inicio es en tiempos diferentes, por ejemplo la suma de un escalû°n que inicie en el tã
=ã
0 mas otro que inicia en tã
=ã
1, es decir que (como se muestra en la figura 5.1)
t=-1:0.01:3; ã u=us(t)+us(t-1); plot(t,u); axis([-1 3 -.1 2.1]) title(ãsuma de funcionesã)
-
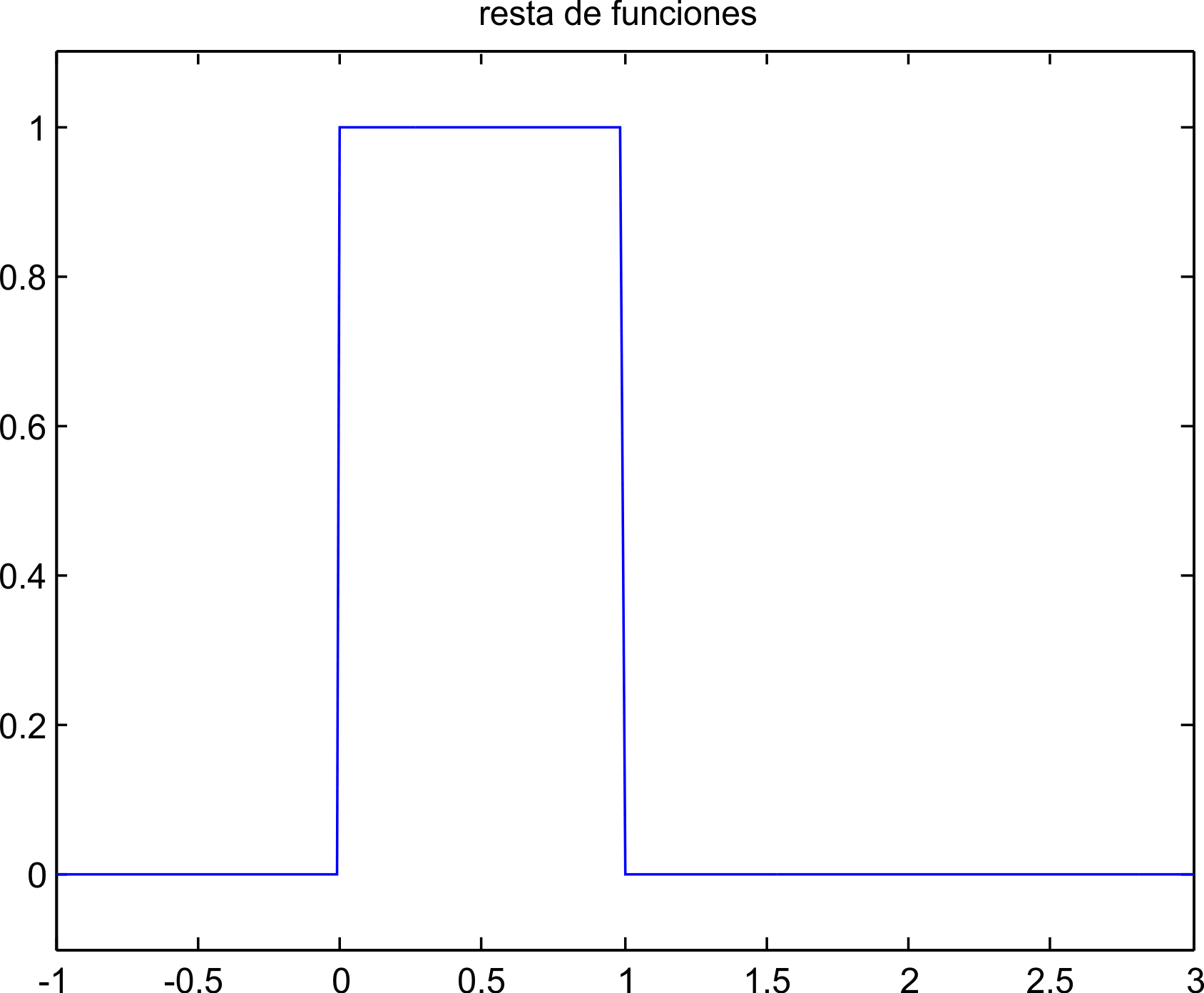
La resta de dos escalones en los tiempos establecidos en el ejemplo anterior, se tiene la expresiû°n, mientras que la grûÀfica correspondiente se muestra en la figura 5.2.
t=-1:0.01:3; ã u=us(t)-us(t-1); plot(t,u); axis([-1 3 -.1 1.1]) title(ãresta de funcionesã)
-
Se pueden sumar y restar rampas, por ejemplo se sumarûÀn y restarûÀn dos rampas las que respectivamente tienen inicio en tã
=ã
0 y tã
=ã
1
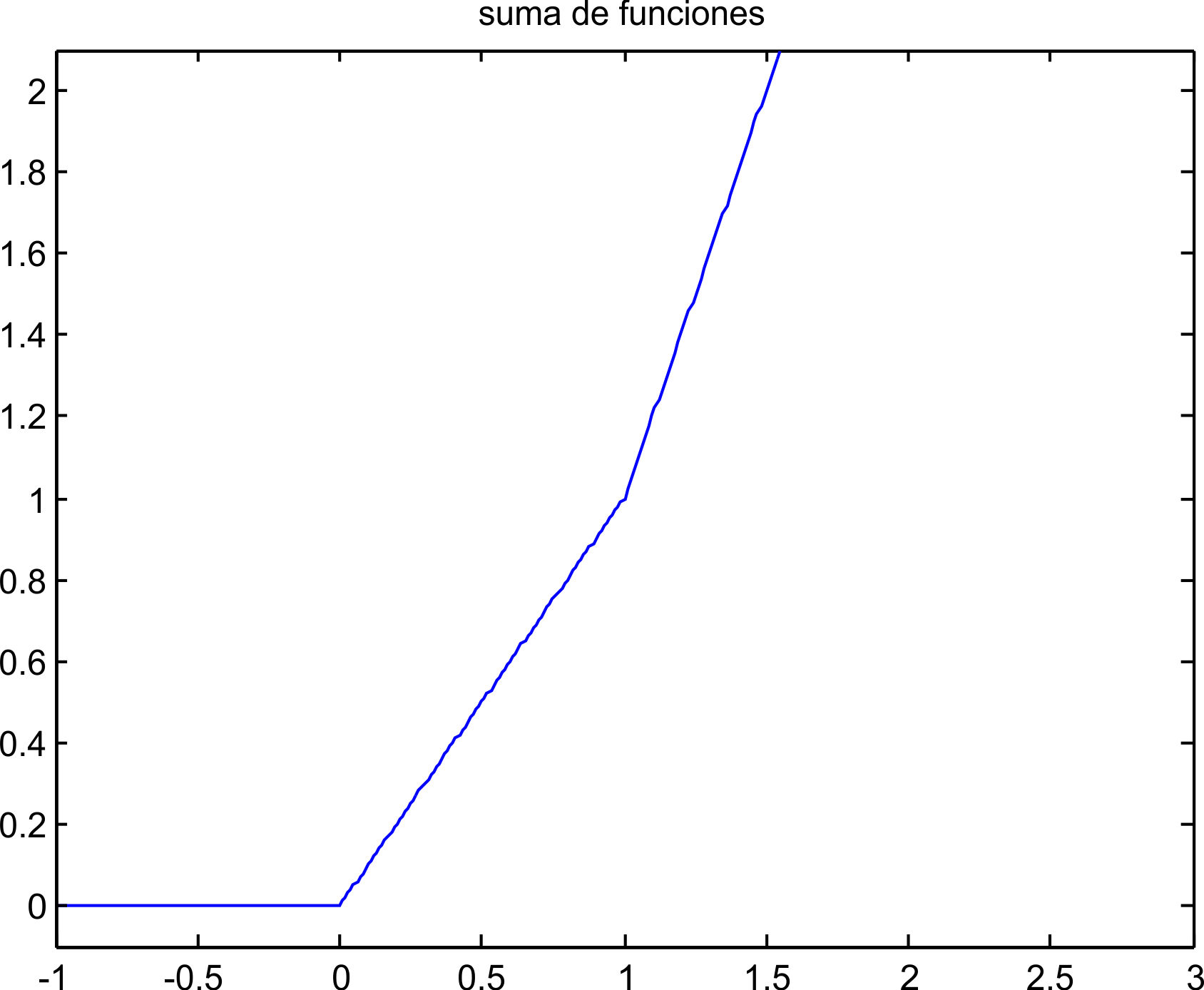
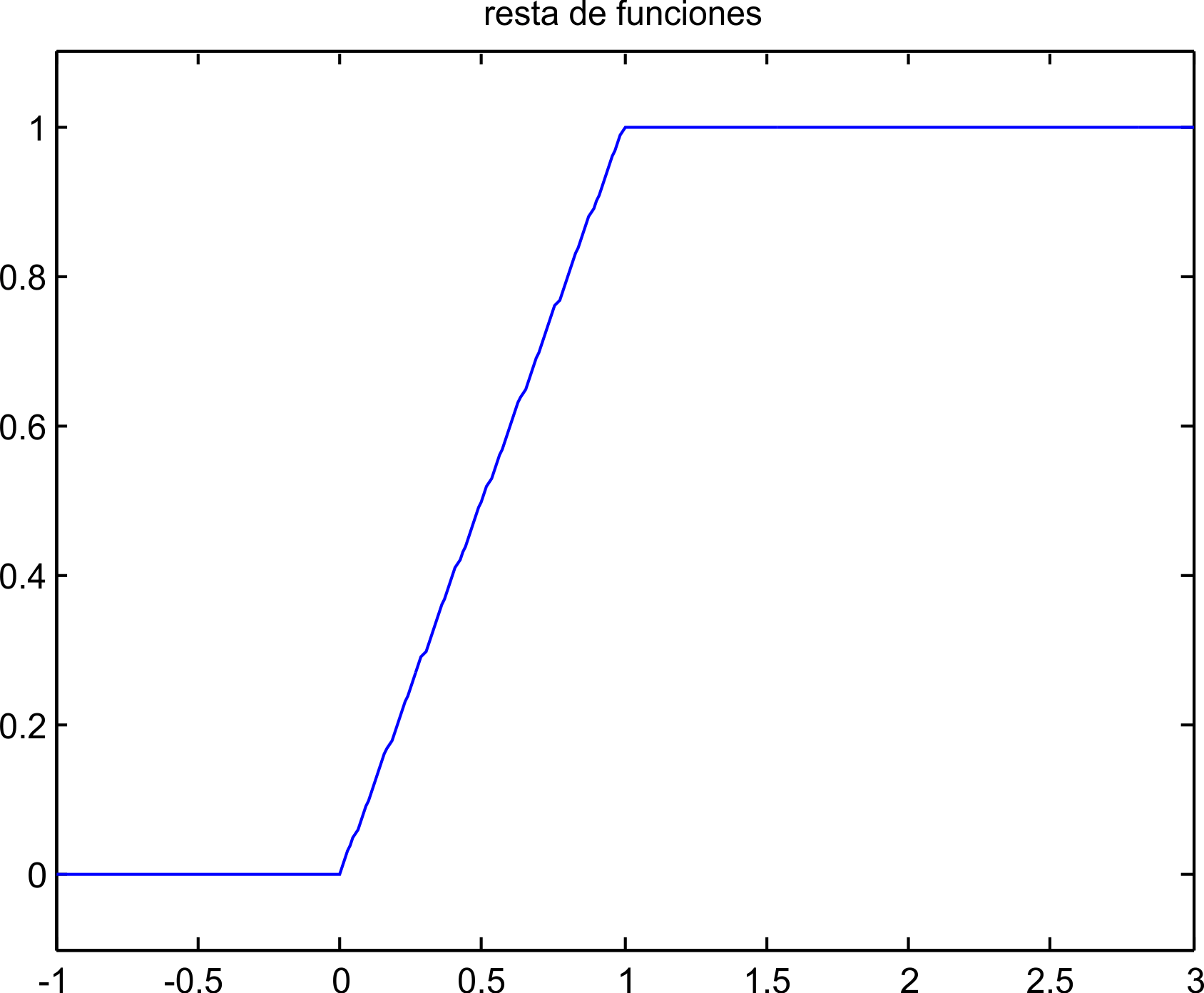
La suma de rampas se muestra en la figura 5.3, mientras que la resta en la figura 5.4
t=-1:0.01:3; ã u=rs(t)+rs(t-1); plot(t,u); axis([-1 3 -.1 2.1]) title(ãsuma de funcionesã) ã
t=-1:0.01:3; ã u=rs(t)-rs(t-1); plot(t,u); axis([-1 3 -.1 1.1]) title(ãresta de funcionesã)
-
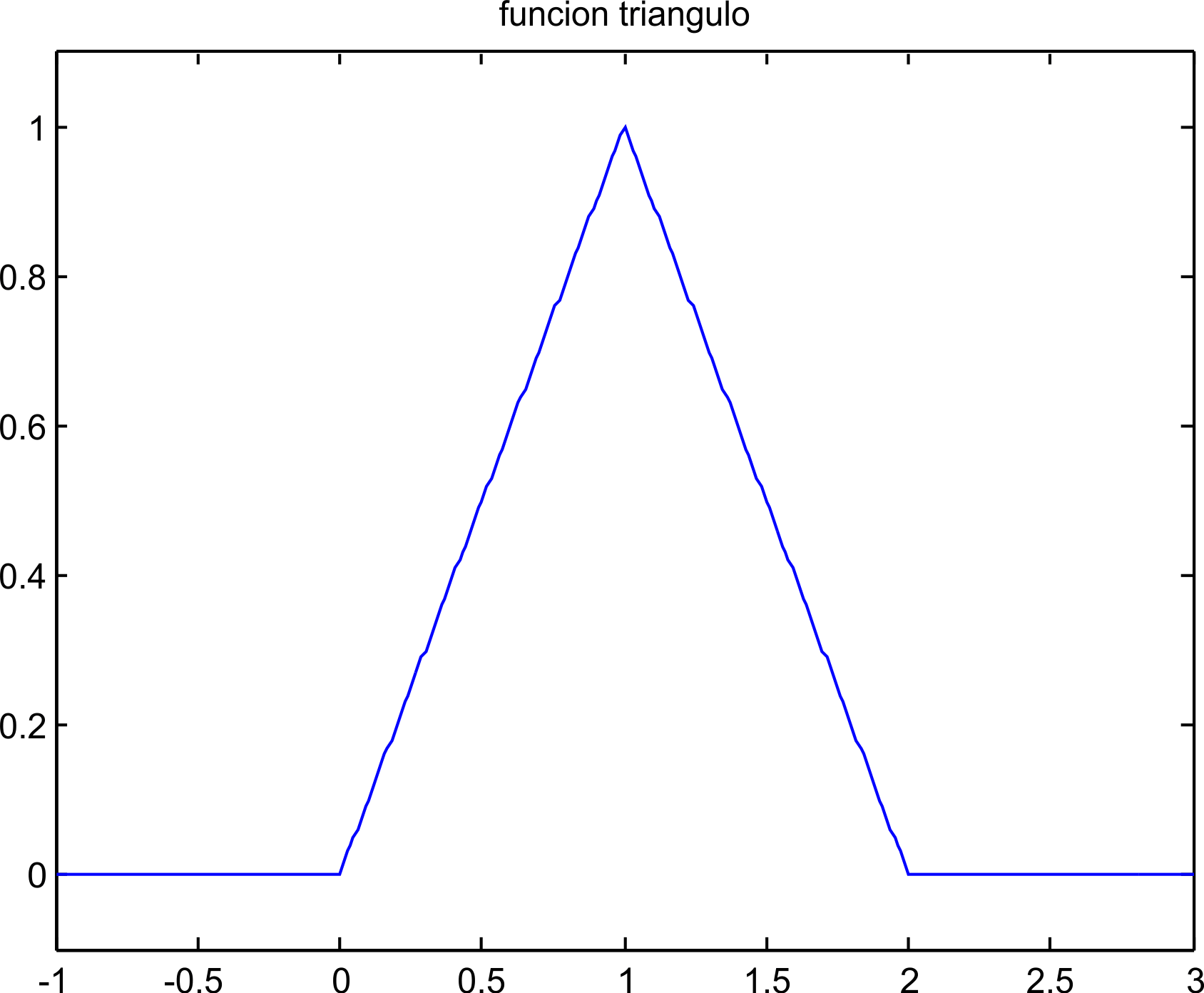
Una funciû°n con forma triangular se puede obtener a partir de la suma y resta de cuatro rampas, para tener la funcion triangular que se muestra en la figura 5.5, se puede expresar de la forma:
o bien
t=-1:0.01:3; ã u=rs(t)-2*rs(t-1)+rs(t-2); plot(t,u); axis([-1 3 -.1 1.1]) title(ãfuncion trianguloã)
Serie de Fourier de TC nivel intermedio:
-
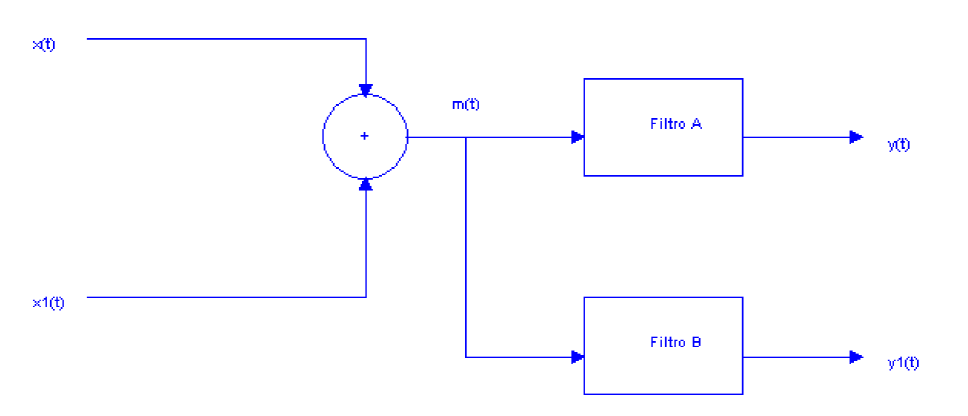
Considere el diagrama de bloques de la figura y las seûÝales x(t) y x1(t).
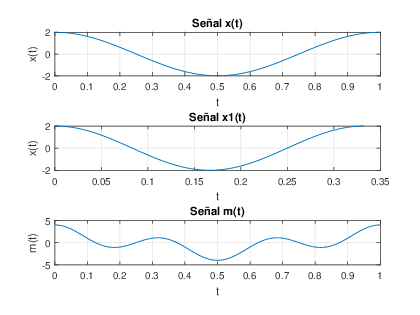
- Graficar x(t),ã x1(t) y m(t).
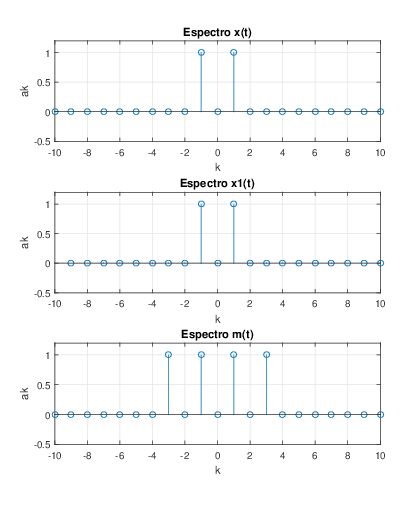
- Obtener los coeficientes de la serie de Fourier deblas seûÝales x(t),ã x1(t) y m(t).
- Graficar el espectro de x(t), x1(t) y m(t).
- Seleccionar y aplicar los filtros Butterwoth apropiados de manera que y(t)ã =ã x(t) y y1(t)ã =ã x1(t).
-
Preguntas de investigaciû°n y reflexiû°n.
- En este ejercicio, los filtro seleccionados fueron de orden 6, pruebe el mismo ejercicio con filtros de orden 2 y 4 e identifique que diferencias existen.
- Compare la salida de ambos filtros con las correspondientes seûÝales de entrada e identifique que diferencia existe.
- Para los filtros de segundo orden, obtenidos con la funciû°n butter(), exprese la funciû°n de transferencia, el modelo en el dominio del tiempo y la expresiû°n de la respuesta en frecuencia de cada filtro.
- Para cada uno de los filtros de segundo orden, grafique la respuesta en frecuencia en magnitud y ûÀngulo.
- En las grûÀficas de la respuesta en frecuencia de los filtros de orden 6, se ha presentado sû°lo la magnitud y no se ha incluido el ûÀngulo de fase. ô¢Como afecta el ûÀngulo de fase del filtro en la seûÝal filtrada?
Soluciû°n
6. a) Para la generaciû°n, simulaciû°n y grûÀficas de las seûÝales x(t),ã x1(t) y m(t), mostradas en la figura. Se observa que el periodo de m(t) es Tã =ã 1.%Senal x(t): wo=2*pi; % Frecuencia fundamental de la senal T=1; % Periodo de la senal t=0:.001:T-0.001; %Intervalo en un periodo x=2*cos(wo*t); subplot(311),plot(t,x),grid;title(ãSeûÝal x(t)ã); xlabel(ãtã); ylabel(ãx(t)ã); %Senal x1(t): wo1=6*pi; % Frecuencia fundamental de la senal T=1/3; % Periodo de la senal t=0:.001:T-0.001; x1=2*cos(wo1*t); subplot(312),plot(t,x1),grid;title(ãSeûÝal x1(t)ã); xlabel(ãtã); ylabel(ãx(t)ã); %Senal m(t): wo2=2*pi; % Frecuencia fundamental de la senal T=1; % Periodo de la senal t=0:.001:T-0.001; m=2*cos(wo2*t)+2*cos(3*wo2*t); subplot(313),plot(t,m),grid;title(ãSeûÝal m(t)ã); xlabel(ãtã);ylabel(ãm(t)ã);6. b) Ya que x(t),ã x1(t) y m(t) son seûÝales coseno, ûˋstas se pueden expresar de forma exponencial y obtener los coeficientes de forma directa, esto es
Para la seûÝal x(t), en donde ü0ã =ã 2ü, se tiene:
y los coeficientes espectrales son
Para la seûÝal x1(t)ã =ã 2cos(6üt), en donde ü0ã =ã 6ü, se tiene:
Para la seûÝal m(t)ã =ã x(t)ã +ã x1(t)ã =ã 2cos(ü0 t)ã +ã 2cos(3 ü0 t), en donde ü0ã =ã 2ü, se tiene:
6. c) Para obtener los coeficientes de la serie exponencial de Fourier de la seûÝales x(t), x1(t) y m(t) se utilizan las funciones fft() y fftshift(), a partir de los cuales se obtiene el diagrama espectral de cada una de las seûÝales. Ya que los coeficientes son reales se grafica sû°lo la magnitud de los coeficientes.%senal x(t) wo=2*pi; T=1; t=0:0.001:T-0.001; x=2*cos(wo*t); %Grafica del espectro de x(t) ak=(1/length(t))*fft(x); %calculo de los coeficientes ak ak1=fftshift(ak); %calculo de los coeficientes ak con k=0 centrada k1=(length(ak1)/2)+1; k1=-10:10; subplot(311), stem(k1,ak1(((((length(t)/2)+1))-10):((length(t)/2)+1)+10), ãLineWidthã,2); grid;title(ãEspectro x(t)ã);xlabel(ãkã);ylabel(ãakã);% coeficientes ak axis([-10 10 -.25 1.25]) %senal x1(t) wo1=6*pi; T1=1/3; t=0:.001:T1-0.001; x1=2*cos(wo1*t); %Grafica del espectro de x1(t) ak=(1/length(t))*fft(x1); ak1=fftshift(ak); k1=(length(ak1)/2)+1; k1=-10:10; subplot(312), stem(k1,ak1(((((length(t)/2)+1))-10):((length(t)/2)+1)+10), ãLineWidthã,2); grid;title(ãEspectro x(t)ã);xlabel(ãkã);ylabel(ãakã);% coeficientes ak axis([-10 10 -.25 1.25]) %senal m(t) wo2=2*pi; T2=1; t=0:.001:T2-0.001; m=2*cos(wo*t)+2*cos(wo1*t); %Grafica del espectro de m(t) ak=(1/length(t))*fft(m); ak1=fftshift(ak); k1=(length(ak1)/2)+1; k1=-10:10; subplot(313), stem(k1,ak1(((((length(t)/2)+1))-10):((length(t)/2)+1)+10), ãLineWidthã,2); grid;title(ãEspectro x(t)ã);xlabel(ãkã);ylabel(ãakã);% coeficientes ak axis([-10 10 -.25 1.25])6. d) Para filtrar las seûÝales y recuperarlas, es decir, para obtener y(t)ã =ã x(t) y y1(t)ã =ã x1(t) se utilizan dos distintos filtros Butterwoth con la funciû°n butter(), cuya seûÝal de entrada es m(t).
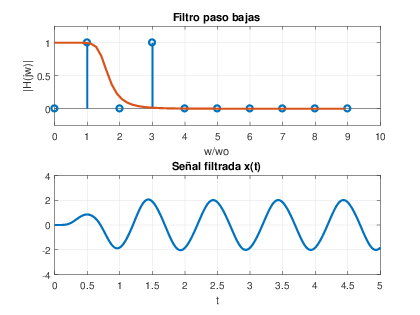
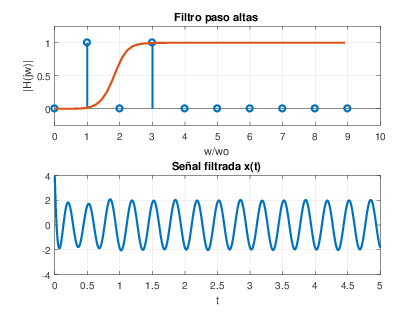
Para y(t)ã =ã x(t) se aplica un filtro paso bajas con frecuencia de corte ücã =ã 1.5ã ü0.
La respuesta en frecuencia del filtro, las componentes espectrales y la salida del filtro se presentan en la figura 5.8.
En la primera grûÀfica se presenta la magnitud de la respuesta en frecuencia del filtro paso bajas (en rojo) y las componentes espectrales de la seûÝal x(t) (en azul). Se observa que el filtro claramente deja pasar la primera componente, kã =ã 1, y atenua prûÀcticamente la segunda componente, kã =ã 2.
En la segunda grûÀfica se presenta la seûÝal x(t) ya filtrada. Se observa el periodo transitorio y la salida permanente en la que se identifica su amplitud y frecuencia, la cual corresponde a x(t).
%Senal m(t): wo2=2*pi; T=1; t=0:.001:T-0.001; m=2*cos(wo2*t)+2*cos(3*wo2*t); %Filtro 1 para obtener y(t)=x(t) [b, a] = butter(6,1.5*wo2,ãsã); %Filtro Paso bajas [H, w] = freqs(b,a); subplot(211),plot(w,abs(H),ãlinewidthã,2);grid; title(ãFiltro paso bajasã);xlabel(ãwã);ylabel(ã|H(jw)|ã) t=0:.001:5*T-0.001; m=2*cos(wo2*t)+2*cos(3*wo2*t); y=lsim(b,a,m,t); subplot(212),plot(t,y,ãlinewidthã,2); grid title(ãSeûÝal filtrada x(t)ã);xlabel(ãtã);Para el segundo filtrado y1(t)ã =ã x1(t) se aplica un filtro paso altas con frecuencia de corte ücã =ã 2ã ü0.
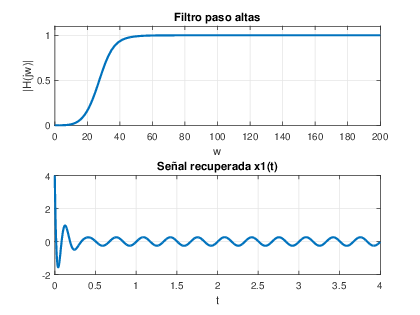
De nuevo, en la figura 5.9 se observa la respuesta en frecuencia del filtro paso altas y la seûÝal x1(t) recuperada, en la que se identifica su amplitud y frecuencia.
%Senal m(t): wo2=2*pi; T=1; t=0:.001:T-0.001; m=2*cos(wo2*t)+2*cos(3*wo2*t); %Filtro 2 para obtener y1(t)=x1(t) [b, a] = butter(6,2*wo2,ãhighã,ãsã); %Filtro Paso altas [H, w] = freqs(b,a); subplot(211),plot(w,abs(H),ãlinewidthã,2);grid; title(ãFiltro paso altasã);xlabel(ãwã);ylabel(ã|H(jw)|ã) t=0:.001:3*T-0.001; m=2*cos(wo2*t)+2*cos(3*wo2*t); y=lsim(b,a,m,t); subplot(212),plot(t,y,ãlinewidthã,2); grid title(ãSeûÝal recuperada x1(t)ã);xlabel(ãtã); -
En esta aplicaciû°n se continua con el concepto de filtrado. Se presenta cû°mo generar dos seûÝales y como filtrarlas. En este ejercicio se integran los conocimientos de seûÝales, de sistemas y el comportamiento en el dominio de la frecuencia, el cual tiene gran importancia para obtener la respuesta del sistema en el dominio del tiempo.
Se consideran dos seûÝales x(t) y x1(t), una de alta y otra de baja frecuencia respectivamente, que al sumarlas se forma la seûÝal m(t) que simula una seûÝal con interferencia. Se consideran sistemas, A y B, que funcionan como filtros cuya seûÝal de entrada es m(t) y se pretende obtener en las respectivas salidas, separar las dos seûÝales y(t)ã =ã x(t) y y1(t)ã =ã x1(t) para eliminar la interferencia, tal como se muestra en el diagrama de bloques:- Graficar x(t),ã x1(t) y m(t).
- Obtener los coeficientes de la serie de Fourier de las seûÝales x(t),ã x1(t) y m(t).
- Graficar el espectro de x(t), x1(t) y m(t).
- Seleccionar y aplicar los filtros Butterwoth apropiados de manera que y(t)ã =ã x(t) y y1(t)ã =ã x1(t).
Soluciû°n
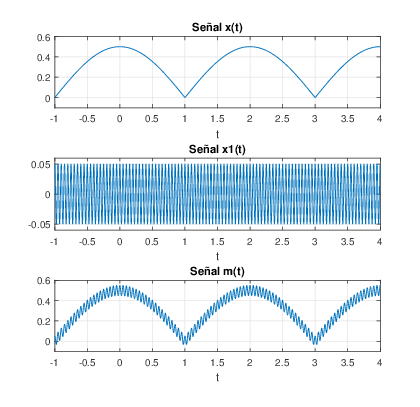
2. a) La grûÀfica de cada una de las seûÝales x(t),ã x1(t) y m(t) est=-1:0.001:4-0.001; x=abs((1/2)*cos((pi/2)*t)); x1=(1/20)*cos(40*pi*t); m=x+x1; subplot(311),plot(t,x), title(ãSeûÝal x(t)ã); xlabel(ãtã); axis([-1 4 -.1 .6]);grid subplot(312),plot(t,x1),title(ãSeûÝal x1(t)ã); xlabel(ãtã); axis([-1 4 -.06 .06]);grid subplot(313),plot(t,m),title(ãSeûÝal m(t)ã); xlabel(ãtã); axis([-1 4 -.1 .6]);grid2. b)Coeficientes de x(t)Los coeficientes espectrales se determinan mediante la Ecuaciû°n de AnûÀlisis:
los cuales se utilizan para aproximar a la seûÝal a travûˋs de la Ecuaciû°n de SûÙntesis de Fourier:
Resolviendo numûˋricamente la integral definida en un periodo se obtienea0ã =ã 0.3183
aã ãã 1*ã =ã a1ã =ã 0
aã ãã 2*ã =ã a2ã =ã 0.1061
aã ãã 3*ã =ã a3ã =ã 0
aã ãã 4*ã =ã a4ã =ã ã ãã 0.0212
...
Los coeficientes espectrales de cada de una de las seûÝales tambiûˋn se pueden obtener mediante las funciones fft() y fftshift().
Coeficientes de x1(t)
Ya que ü0ã =ã (ü)/(2) , entonces: , la cual corresponde a la armû°nica 80, quedando los coeficientes a partir de la Ec. 5.8:
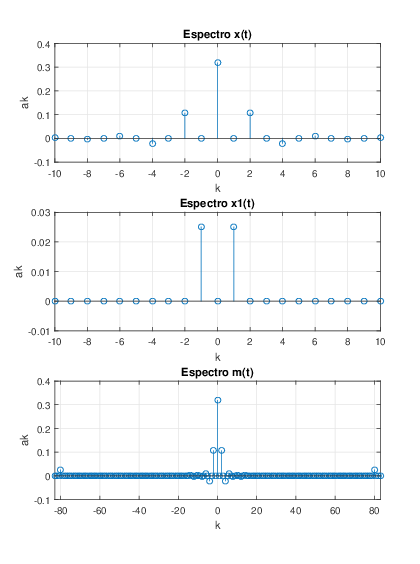
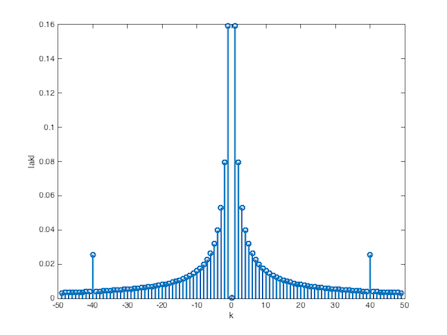
2. c) La grûÀfica la magnitud de los coeficientes de ak con respecto a k se presenta en la figura 5.12. Se observa que en los coeficientes de la seûÝal m(t) aparecen en los extremos los de x1(t) .
%senal x(t) wo=2*pi; T=4; t=0:0.001:T-0.001; x=abs((1/2)*cos((pi/2)*t)); %Grafica del espectro de x(t) ak=(1/length(t))*fft(x); %calculo de los coeficientes ak ak1=fftshift(ak); %calculo de los coeficientes ak con k=0 centrada k1=(length(ak1)/2)+1; k1=-10:10; subplot(311), stem(k1,ak1(((((length(t)/2)+1))-10):((length(t)/2)+1)+10)); grid;title(ãEspectro x(t)ã); % coeficientes ak xlabel(ãkã);ylabel(ãakã); %senal x1(t) wo1=80*pi; T=1/20; t=0:.001:T-0.001; x1=(1/20)*cos(40*pi*t); %Grafica del espectro de x1(t) ak=(1/length(t))*fft(x1); ak1=fftshift(ak); %k1=(length(ak1)/2)+1; k1=-10:10; subplot(312), stem(k1,real(ak1(((((length(t)/2)+1))-10):((length(t)/2)+1)+10))); grid;title(ãEspectro x1(t)ã);xlabel(ãkã);ylabel(ãakã);%coeficientes ak %senal m(t) wo=pi/2; T=4; t=0:.001:T-0.001; m=abs((1/2)*cos((pi/2)*t))+(1/20)*cos(40*pi*t); %Grafica del espectro de m(t) ak=(1/length(t))*fft(m); ak1=fftshift(ak); k1=(length(ak1)/2)+1; k1=-85:85; subplot(313),... stem(k1,real(ak1(((((length(t)/2)+1))-85):((length(t)/2)+1)+85))); grid;title(ãEspectro m(t)ã);xlabel(ãkã);ylabel(ãakã);% coeficientes ak axis([-83 83 -.1 .4])
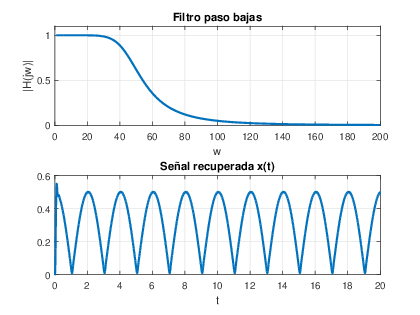
2. d) La seûÝal m(t) es la suma de la seûÝal de baja frecuencia y la de alta frecuencia. Para filtrar las seûÝales, es decir, y(t)ã =ã x(t) se aplica un filtro paso bajas de cuarto orden con frecuencia de corte ücã =ã 3ã ü0 para recuperar x(t). Para la seûÝal de alta frecuencia se selecciona un filtro paso alta de cuarto orden con frecuencia de corte ücã =ã 20ã ü0
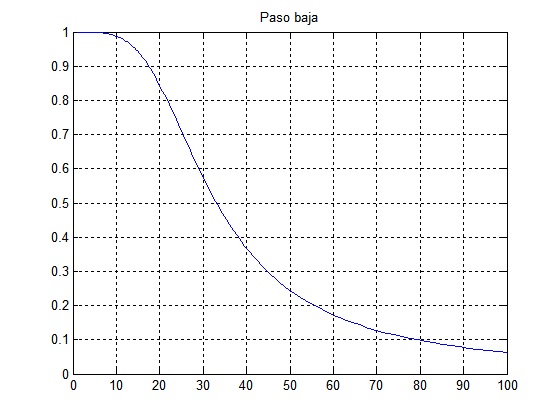
Se presenta la respuesta en frecuencia del filtro y la seûÝal correspondiente seûÝal filtrada.A partir de las figuras 5.13 y 5.14 se observan las seûÝales a la salida del filtro utilizando la funciû°n lsim().%Senal m(t): wo=pi/2; T=4; t=0:.001:T-0.001; m=abs((1/2)*cos((pi/2)*t))+(1/20)*cos(40*pi*t); %Filtro 1 para obtener y(t)=x(t) [b, a] = butter(4,30*wo,ãsã); %Filtro Paso bajas [H, w] = freqs(b,a); subplot(211),plot(w,abs(H),ãlinewidthã,2);grid; title(ãFiltro paso bajasã);xlabel(ãwã);ylabel(ã|H(jw)|ã) axis([0 200 0 1.1]) t=0:.001:5*T-0.001; m=abs((1/2)*cos((pi/2)*t))+(1/20)*cos(40*pi*t); y=lsim(b,a,m,t); subplot(212),plot(t,y,ãlinewidthã,2); grid title(ãSeûÝal recuperada x(t)ã);xlabel(ãtã); figure %Filtro 2 para obtener y1(t)=x1(t) [b, a] = butter(4,20*wo,ãhighã,ãsã); %Filtro Paso altas [H, w] = freqs(b,a); subplot(211),plot(w,abs(H),ãlinewidthã,2);grid; title(ãFiltro paso altasã);xlabel(ãwã);ylabel(ã|H(jw)|ã) axis([0 200 0 1.1]) t=0:.001:1*T-0.001; m=2*cos(wo2*t)+2*cos(3*wo2*t); y=lsim(b,a,m,t); subplot(212),plot(t,y,ãlinewidthã,2); grid title(ãSeûÝal recuperada x1(t)ã);xlabel(ãtã);FiltroPasoBajas:y(t)ã =ã x(t) Para que la seûÝal de salida y(t) sea igual a x(t), es necesario aplicar un filtrado. Y ya que lo que se desea eliminar es la armû°nica nû¤mero 80, la cual es de frecuencia alta, es necesario utilizar un sistema que sea un filtro Paso Bajas, en el cual la frecuencia de corte debe estar entre y .
Para generar un sistema filtro en MatLab se utiliza la funciû°n butter(), la cual toma como parûÀmetros el orden del sistema, la frecuencia de corte, el tipo de filtro y el dominio en el que darûÀ la respuesta, tal como se muestra:
t=0:0.001:4-0.001; x=abs((1/2)*cos((pi/2)*t)); x1=(1/20)*cos(40*pi*t); m=x+x1; [b,a]=butter(2,8*pi,ãsã); b = 0 0 631.6547 a = 1.0000 35.5431 631.6547Esta funciû°n proporciona los valores de los vectores a y b que son los coeficientes de la Funciû°n de Transferencia.
La funciû°n freqs() genera la respuesta del sistema en el dominio de la frecuencia tomando como parûÀmetros los coeficientes a y b obtenidos anteriormente.
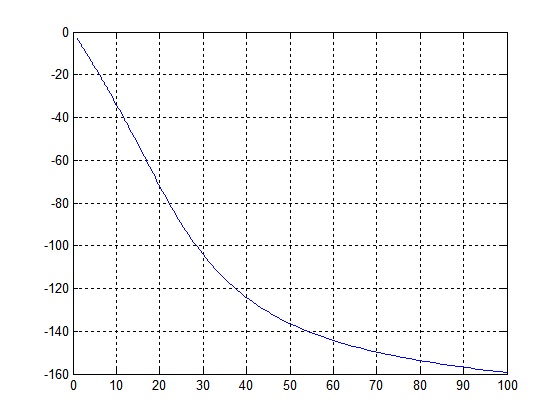
[H w]=freqs(b,a); subplot(321),plot(w,abs(H));grid;title(ãPaso bajaã) subplot(323),plot(w,angle(H)*180/pi);grid subplot(325),y1=lsim(b,a,m,t); plot(t,y1);grid
Y graficando el valor absoluto de H y sus ûÀngulos se obtiene:
Se observa que este sistema en la armû°nica 80 la atenû¤a en 0.1. Esto es:Los ûÀngulos de H(jü) muestran el desfasamiento que puede provocar el sistema en la seûÝal a la salida del filtro.
Finalmente, la seûÝal de respuesta de este sistema obtenida al darle como entrada a m(t) es:Con esto se observa que este sistema reduce en un factor considerable la interferencia que tenûÙa la seûÝal de entrada aproximandose a la seûÝal x(t). Aunque considerando que hay un leve retraso de la seûÝal en la grûÀfica y que al inicio se presenta un intervalo transitorio de la seûÝal.Filtro Paso Altas: y1(t)=x1(t)Para que la seûÝal de salida y1(t) sea igual a x1(t), es necesario aplicar la seûÝal a un sistema que dejar pasar la armû°nica nû¤mero 80, la cual es de frecuencia alta, por lo que es necesario utilizar un filtro Paso Altas, en el cual la frecuencia de corte debe estar entre y .
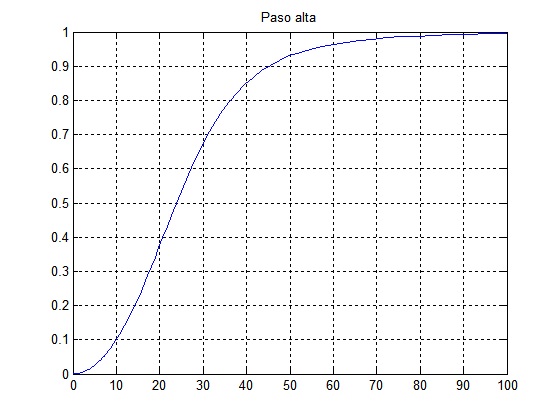
[b,a]=butter(2,10*pi,ãHighã,ãsã) b = 1 0 0 a = 1.0000 44.4288 986.9604Cû°digo tomado del archivo proyecto c.mLa Funciû°n de Transferencia de este filtro es:Obteniendo la respuesta en frecuencia de este sistema tenemos:
[H w]=freqs(b,a); subplot(322),plot(w,abs(H));grid;title(ãPaso altaã) subplot(324),plot(w,angle(H)*180/pi);grid subplot(326),y1=lsim(b,a,m,t); plot(t,y1);gridGraficando el valor absoluto de H y sus ûÀngulos obtenemos:En este sistema observamos que en la primera armû°nica se atenû¤a en aproximadamente 0.001 y que la armû°nica 80 la atenû¤a en 0.99. Esto es:Finalmente, la seûÝal de respuesta de este sistema obtenida al aplicar como entrada m(t) es:Se observa que este sistema es un filtro cuya seûÝal de respuesta es una buena aproximaciû°n a la funciû°n x1(t). Aunque sigue presentando el mismo problema, ya que al inicio de la grûÀfica hay un transitorio considerable y a lo largo de la seûÝal se observan ligeras deformaciones de la seûÝal.
-
En esta aplicaciû°n se generan y grafican dos seûÝales x(t) y x1(t), se obtiene la resultante de la suma de las mismas m(t). Se obtiene la grûÀfica de los espectros de cada una y por û¤ltimo se seleccionan los filtros adecuados para separar las dos seûÝales y(t) y y1(t). Previamente se obtienen los coeficientes espectrales de cada seûÝal de forma analûÙtica.
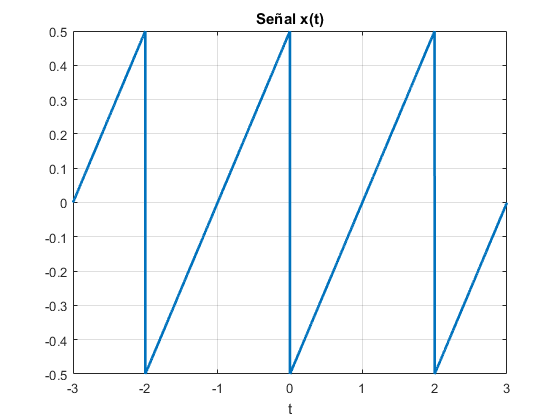
Considere el diagrama de bloques de la figura 5.21 y las seûÝales x(t) y x1(t). La seûÝal x(t) es periû°dica con Tã =ã 2 como se muestra en la figura 5.22.
- Obtener la expresiû°n de x(t) y graficar x(t),ã x1(t) y m(t).
- Obtener los coeficientes de la serie de Fourier deblas seûÝales x(t),ã x1(t) y m(t).
- Graficar el espectro de x(t), x1(t) y m(t).
- Seleccionar y aplicar los filtros Butterwoth apropiados de manera que y(t)ã =ã x(t) y y1(t)ã =ã x1(t).
-
Preguntas de investigaciû°n y reflexiû°n.
- En este ejercicio, los filtros seleccionados fueron de orden 6, pruebe el mismo ejercicio con filtros de orden 2 y 4 e identifique que diferencias existen.
- Compare la salida de ambos filtros con las correspondientes seûÝales de entrada e identifique que diferencia existe.
- Para los filtros de segundo orden, obtenidos con la funciû°n butter(), exprese la funciû°n de transferencia, el modelo en el dominio del tiempo y la expresiû°n de la respuesta en frecuencia de cada filtro.
- Para cada uno de los filtros de segundo orden, grafique la respuesta en frecuencia en magnitud y ûÀngulo.
- En las grûÀficas de la respuesta en frecuencia de los filtros de orden 6, se ha presentado sû°lo la magnitud y no se ha incluido el ûÀngulo de fase. ô¢Como afecta el ûÀngulo de fase del filtro en la seûÝal filtrada?
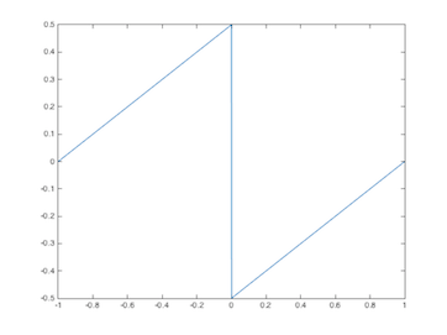
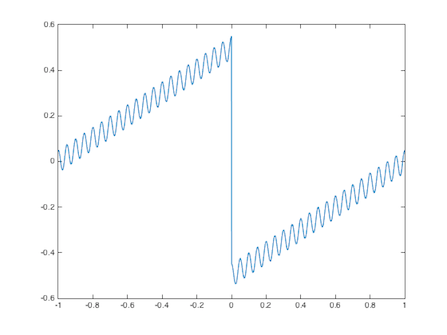
Soluciû°n La seûÝal periodica x(t) se muestra en la figura 5.23, cuyo periodo es Tã =ã 2, la cual se define como
en donde T es el periodo y m es entero constante para la repeticiû°n de la seûÝal. Si mã =ã 0, la expresiû°n de x(t) queda como Tambiûˋn se puede definir en segmentos, en un periodo, para este caso se tomarûÀ el intervalo de ã ãã 1ã ãÊã tã ãÊã 1 quedando como
La periodo y la frecuencia de la seûÝal x(t) son
Para obtener los coeficientes espectrales se utiliza la ecuaciû°n de AnûÀlisis
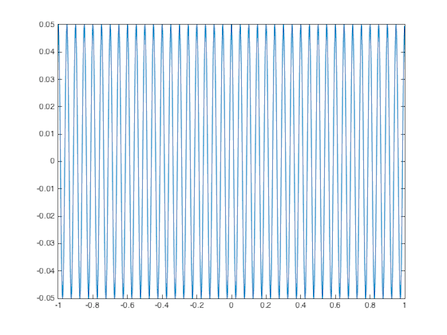
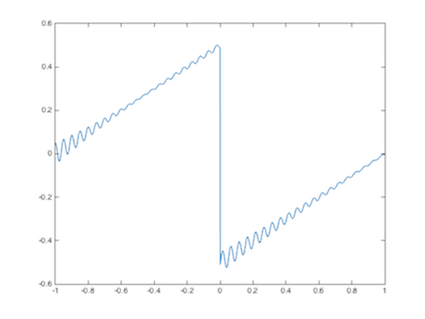
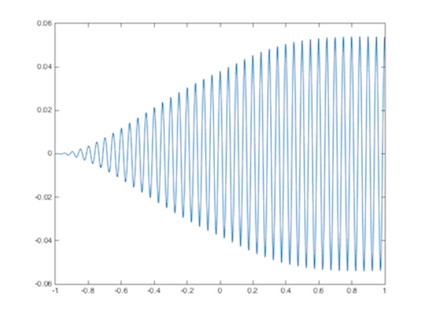
Para la funciû°n definida por la Ec. 5.15 y sustituyendo en Ec. 5.16:Resolviendo primeramente las integrales indefinidasSustituyendo, evaluando y simplificando se obtiene el valor de las integrales definidas comoFinalmente quedaEvaluando paraque al observar la figura 5.23 se identifica directamente que el ûÀrea de la seûÝal en un periodo es cero, por lo que el valor promedio tambiûˋn es cero. O bien se obtiene a0, el valor promedio de la seûÝal a partir deEvaluando para kã =ã 1 donde y|a1|ã =ã 0.15915y asûÙ sucesivamente, obteniendok|ak|0010.159120.079530.0530540.0397850.03183La seûÝal x1(t) se presenta en la figura 5.24 es un coseno de alta frecuencia que altera x(t) cuando se suman las seûÝales, interpretûÀndose como interferencia.
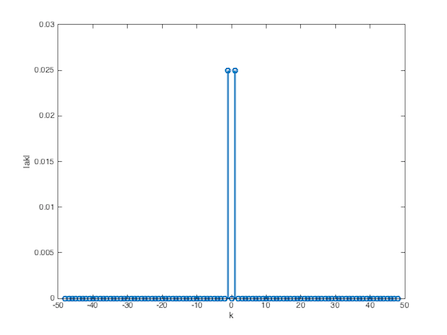
Para obtener los coeficientes de la seûÝal se tienex1 = (1/20)*cos(40*pi*t); figure(8); plot (t,x1);
Los coeficientes se obtienen de manera directa
La seûÝal m(t), se muestra en la figura 5.25.
m = x + x1; figure(2); plot (t,m);Para obtener los coeficientes de la seûÝal m(t), ck, se aplica la propiedad de linealidad, sumando los coeficientes de la seûÝal x(t) con los de x1(t). El periodo y la frecuencia de la seûÝal son Tã =ã 2 y ü0ã =ã ü, obteniendockã =ã akã +ã bkc0ã =ã a0ã +ã b0ã =ã 0c1ã =ã a1ã +ã b1ã =ã j 0.1591c2ã =ã a2ã +ã b2ã =ã j 0.0795...c40ã =ã a40ã +ã b40ã ãã 0.025Verificaciû°n con Matlab
Se presentan las grûÀficas obtenidas mediante el uso de funciones de Matlab.
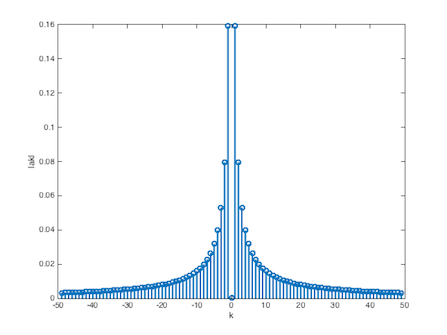
El espectro de x(t) se muestra en la figura 5.26 se calcula con el mismo periodo que se usû° en las grûÀficas anteriores dado que este mismo era el periodo de un diente de sierra.ak=(1/length(t))*fft(x); %calculo de los coeficientes ak ak1=fftshift(ak); %calculo de los coeficientes ak con k=0 centrada k1=(length(ak1)/2)+1; k1=-10:10; ak(1:5) stem(k1,abs(ak1(((((length(t)/2)+1))-10):((length(t)/2)+1)+10)),ãLineWidthã,2); grid;title(ãCoeficientes {a_k} de x(t)ã);xlabel(ãkã);ylabel(ãakã);Para el coseno se utiliza un vector diferente que es t1 porque es una seûÝal con periodo distinto.t1=0:0.001:(1/20)-0.001; x2 = (1/20)*cos(40*pi*t1); ak = (1/length(t1))*fft(x2); ak = ak(1:50) ak = [ak(49:-1:1) ak(2:49)]; k = (-48:48); figure(4); stem(k,abs(ak),ãLineWidthã,2),xlabel(ãkã),ylabel(ã|ak|ã);
A continuacion se muestra el espectro de las seûÝales sumadas:ak = (1/length(t))*fft(m); ak = ak(1:50); ak = [ak(50:-1:1) ak(2:50)]; k = (-49:49); figure(5); stem(k,abs(ak),ãLineWidthã,2),xlabel(ãkã),ylabel(ã|ak|ã);
Filtrado de SeûÝales
Los filtros seleccionados fueron utilizados de acuerdo con la supresiû°n o paso de la frecuencia kü0 asociada a los valores 40*ü equivalente a 125.6.
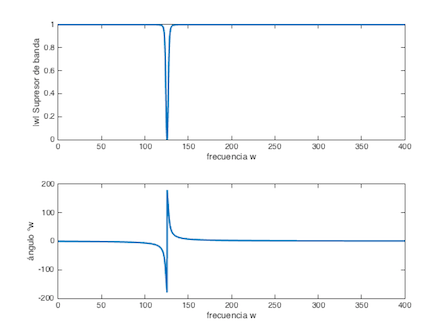
Las grûÀficas de las seûÝales ya filtradas y un acercamiento a cada una de ellas que demuestra el uso del filtro definido y la supresiû°n o paso de la frecuencia con los valores antes mencionados.El uso de un filtro supresor de banda es necesario para obtener la seûÝal x(t).wo = pi; wn = [(39.3205)*wo (40.6725)*wo]; [b a] = butter(2,wn,ãstopã,ãsã); w=0:0.01:400; [h w] = freqs(b,a,w); figure(6); subplot(211),plot(w,abs(h),ãLineWidthã,2),xlabel(ãfrecuencia wã),ylabel(ã|w| Supresor de bandaã); subplot(212),plot(w,angle(h)*180/pi,ãLineWidthã,2),xlabel(ãfrecuencia wã),ylabel(ãangulo ãwã); y = lsim(b,a,m,t); figure(10); subplot(111),plot (t,y);Un filtro paso banda para obtener el ruido (x1(t)):wo = pi; wn = [(39.3205)*wo (40.6725)*wo]; [b a] = butter(2,wn,ãsã); w=0:0.01:400; [h w] = freqs(b,a,w); figure(7); subplot(211),plot(w,abs(h),ãLineWidthã,2),xlabel(ãfrecuencia wã),ylabel(ã|w| Supresor de bandaã); subplot(212),plot(w,angle(h)*180/pi,ãLineWidthã,2),xlabel(ãfrecuencia wã),ylabel(ãangulo ãwã); y = lsim(b,a,m,t); figure(9); subplot(111),plot (t,y);Finalmente se presenta el resultado de las seûÝales filtradas y por lo tanto, separadas: x(t) para la Figura 9 y x1(t) para la Figura 10.
.jpg)
.jpg)

Serie de Fourier de TC nivel avanzado:
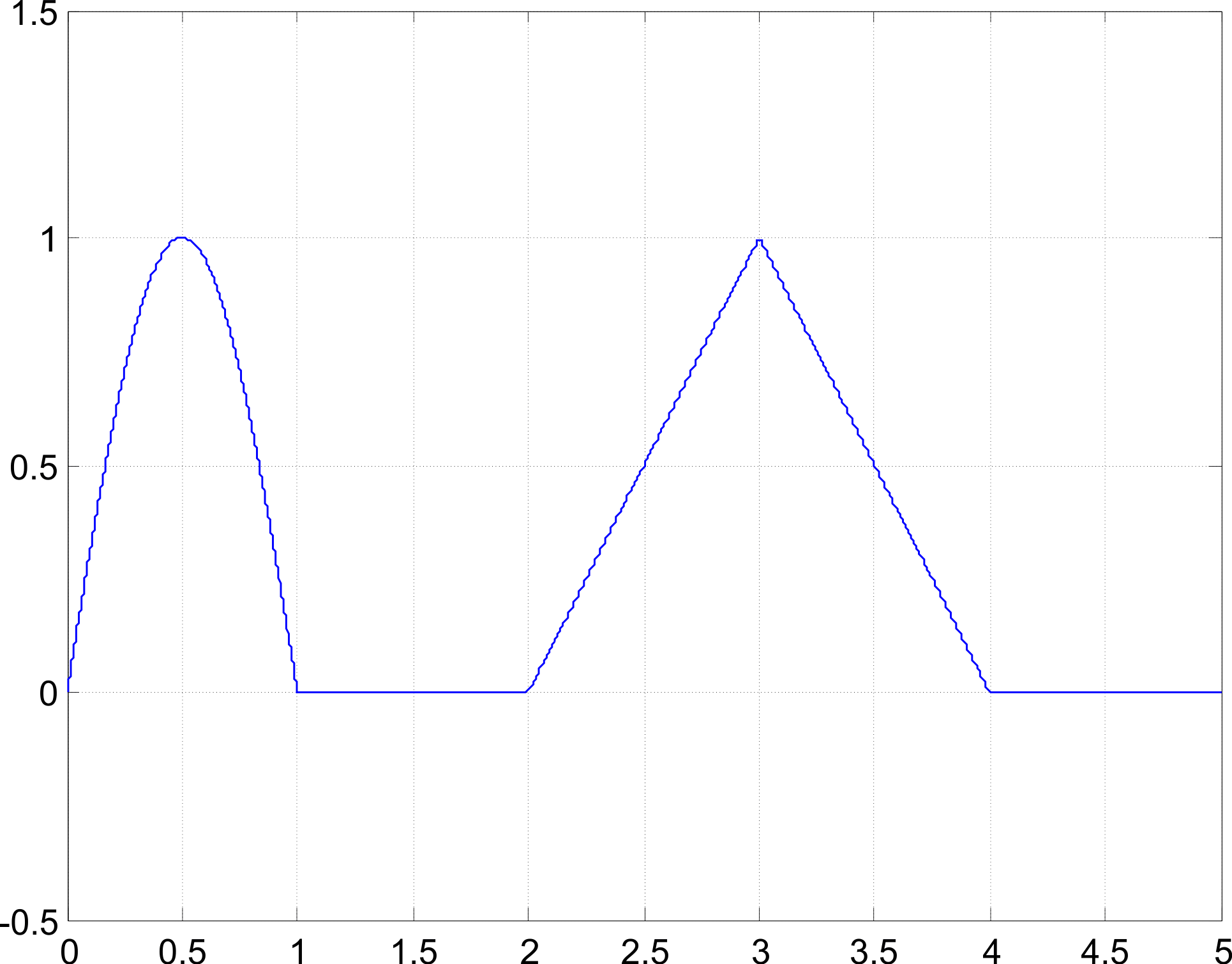
fm=500; tm=1/fm ã t=0:tm:5; % SeûÝal sinusoidal de periodo 2, que el tiempo de inicio es cero To=2; fo=1/To; ã p=sin(2*pi*fo*t); plot(t,p) % para tener medio periodo se genera una senoidal que dure un segundo % se multiplica la seûÝal senoidal por un pulso formado por una resta de % escalones p=(us(t)-us(t-1)).*p; ã %la multiplocaciû°n de ambas funciones da como resultante un lû°bulo de la senoidal, %mismo que inicia en t=0 y termina en t=1 % con lo que se obtiene la onda buscada ã % se busca obtener una rampa de pendiente unitaria que inicie en t=2 y % termine en t=3, observe que la expresiû°n que describe a la rampa es % t-2 evaluada a partir de 2 ã q=rs(t-2)-2*rs(t-3)+rs(t-4); ã % finalmente se suman las funciones calculadas y se obtiene la grûÀfica ã pqr=p+q; ã plot(t,pqr) axis([0 5 -0.5 1.5]) ã
a) el semiciclo senoidal cuya expresiû°n es
ã
t=[0:tm:5];
comp=30;
y=zeros(1,length(t));
for n=1:comp
%componentespara la seûÝal triangular
an=(2*((5*(-5*cos((4*n*pi)/5.) + 5*cos((6*n*pi)/5.) + 2*n*pi*sin((6*n*pi)/5.)))/...
(4.*power(n,2)*power(pi,2)) - (5*(-5*cos((6*n*pi)/5.) + 5*cos((8*n*pi)/5.) + 2*n*pi*sin((6*n*pi)/5.)))/...
(4.*power(n,2)*power(pi,2))))/5.;
bn=(2*((-5*(2*n*pi*cos((6*n*pi)/5.) + 5*sin((4*n*pi)/5.) - 5*sin((6*n*pi)/5.)))/...
(4.*power(n,2)*power(pi,2)) + (5*(2*n*pi*cos((6*n*pi)/5.) + 5*sin((6*n*pi)/5.) - 5*sin((8*n*pi)/5.)))/...
(4.*power(n,2)*power(pi,2))))/5.;
%componentes para el lobulo positivo de la senoidal
an_s=-((cos((5*pi+2*pi*n)/5))/(5*pi+2*pi*n))-((cos((5*pi-2*pi*n)/5))/(5*pi-2*pi*n)) +(1/(5*pi+2*pi*n))...
+(1/(5*pi-2*pi*n));
bn_s=((sin((5*pi-2*pi*n)/5))/(5*pi+2*pi*n))-((sin((5*pi+2*pi*n)/5))/(5*pi-2*pi*n));
f2=(an_s)*cos(2*pi*n*t/5)+(bn_s)*sin(2*pi*n*t/5);
f1=(an)*cos(2*pi*n*t/5)+(bn)*sin(2*pi*n*t/5);
y=y+f2+f1;
plot(t,y)
pause(0.1)
end
y=(1/5)+y;
plot(t,y)
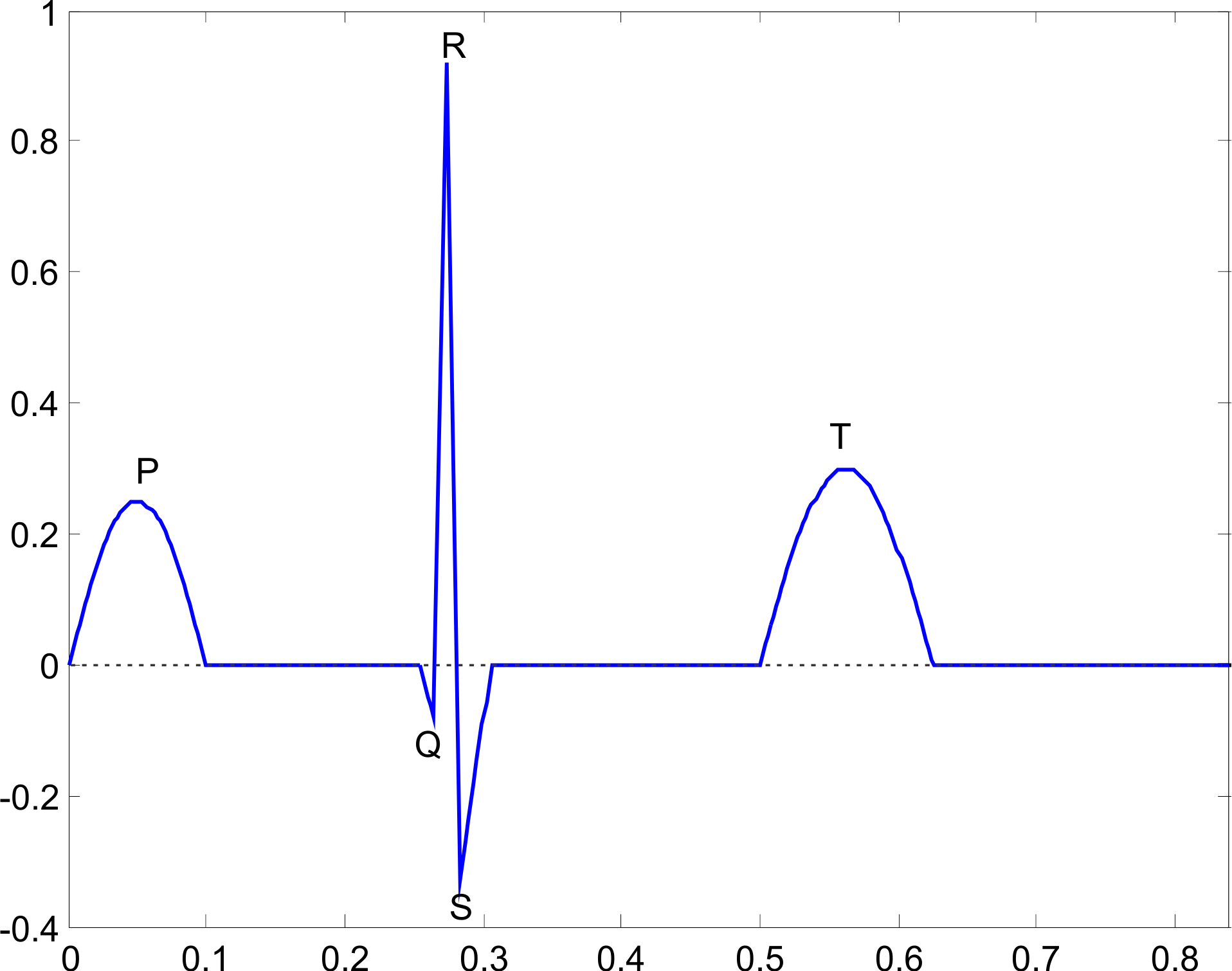
| Onda | Amplitud [mv] | Duraciû°n [s] | Limites (t) | ||||
| P | 0.25 | 0.1 | 0 | - | 0.1 | ||
| PQ | 0.156 | 0.1 | - | 0.256 | |||
| Q | -0.08 | 0.01 | 0.256 | - | 0.266 | ||
| QR | 1 | 0.01 | 0.266 | - | 0.276 | ||
| RS | 0.01 | 0.276 | - | 0.286 | |||
| S | -0.33 | 0.02 | 0.286 | - | 0.308 | ||
| ST | 0.194 | 0.308 | - | 0.502 | |||
| T | 0.3 | 0.125 | 0.502 | - | 0.627 | ||
| TP | 0.236 | 0.627 | - | 0.84 | |||
Análisis de Fourier en TD:
En esta secciû°n de Fourier TD se aplican los conceptos en seûÝales periû°dicas de TC para realizar un anûÀlisis en el dominio de la frecuencia.
Bajo este antecedente se introduce el concepto de filtrado de seûÝales en TD.
En anûÀlisis anterior sirve de base para realizar un sistema de detecciû°n de tonos de marcado bajo el esquema de multifrecuencia de doble tono (DTMF).
Selecciona la dificultad en las caritas de la izquierda.
Análisis de Fourier en TD: nivel principiante:
Mediante las funciones butter() y freqz(), obtenga el siguiente filtro:
Obtenga la expresiû°n de la respuesta en frecuencia de un filtro digital Butterworth paso baja de segundo orden, con una frecuencia de corte üã ãã 10 y grafique la respuesta en frecuencia en amplitud. Verifique la frecuencia de corte.
Análisis de Fourier en TD: nivel intermedio:
En esta actividad la seûÝal x[n] se compone de 4 cosenos. Se utilizaran los filtros para separar cada una de las seûÝales como se indica en la Figura 6.5.

- Obtenga el espectro de la seûÝal x[n] y grafûÙquelo.
- Mediante la funciû°n butter(), seleccione el filtro mûÀs adecuado con el que se pueda separar cada una de las seûÝales.
- Utilice la funciû°n freqz(), grafique la respuesta del filtro y verifique si se ha recuperado adecuadamente la componente de x[n].
Análisis de Fourier en TD: nivel avanzado:
En telûˋfonos con marcaciû°n por Tono, al presionar cada botû°n se genera un conjunto û¤nico de seûÝales de dos tonos, que se denominan seûÝales de multifrecuencia de doble tono (DTMF), que se procesan para identificar el nû¤mero marcado determinando las dos frecuencias de tonos asociadas. Se utilizan siete frecuencias para codificar los diez dûÙgitos y los dos botones especiales marcados "*"y "#". Las frecuencias de banda baja son 697Hz, 770Hz, 852Hz y 941 Hz. Las restantes tres frecuencias pertenecientes a la banda alta son 1209Hz, 1336Hz, y 1477Hz. La cuarta frecuencia de banda alta de 1633Hz no se usa y se ha asignado para aplicaciones que permitan el uso de cuatro botones para servicios especiales. Las asignaciones de frecuencia utilizadas en el esquema de marcado por Tono se muestran en la Figura 6.6.


-
Genere los tonos correspondientes a cada botû°n. Por ejemplo, para el dûÙgito 1 se tiene: d1[n]ã =ã sinãã(ü1n)/(öÝ)ãã ã +ã sinãã(ü5n)/(öÝ)ãã
en donde d1 es la seûÝal para el tono del botû°n No. 1 y öÝ es la frecuencia de muestreo de 8192 Hz. - Genere los vectores d0 a d9 para representar los 10 dûÙgitos con una longitud n de 0ã ãÊã nã ãÊã 9999. Escuche la seûÝal con sound(). Por ejemplo sound(d1,8192).
-
La funciû°n fft() calcula N muestras de la DTFT de una seûÝal de longitud finita a las frecuencias ükã =ã (2ük)/(N)para 0ã ãÊã kã ãÊã Nã ãã 1.
Por ejemplo, D0 = fft (d0,2048) calcula 2048 muestras correspondientes al espectro del dûÙgito d0.
Grafique la respuesta en frecuencia para cada dûÙgito. - Defina un vector ãspaã de 500 muestras con la funciû°n zeros, que permitirûÀ dejar un espacio entre tono y tono.
-
Defina un vector que contenga un nû¤mero de telûˋfono:
tel = [do spa d1 spa d2 spa ...]
Escuche el tono con sound(). - Analice y realice el algoritmo para separar las frecuencias y detectar el No. marcado.
- Obtenga la grûÀfica del espectro de cada dûÙgito e identifique las frecuencias de cada componente.
- Obtenga la grûÀfica de la respuesta en frecuencia del filtro paso bajas.
- Obtenga la grûÀfica de la respuesta en frecuencia del filtro paso altas.
- Obtenga las grûÀficas de la respuesta en frecuencia de los filtros paso banda.
- Identifique en cada caso las frecuencias de corte.